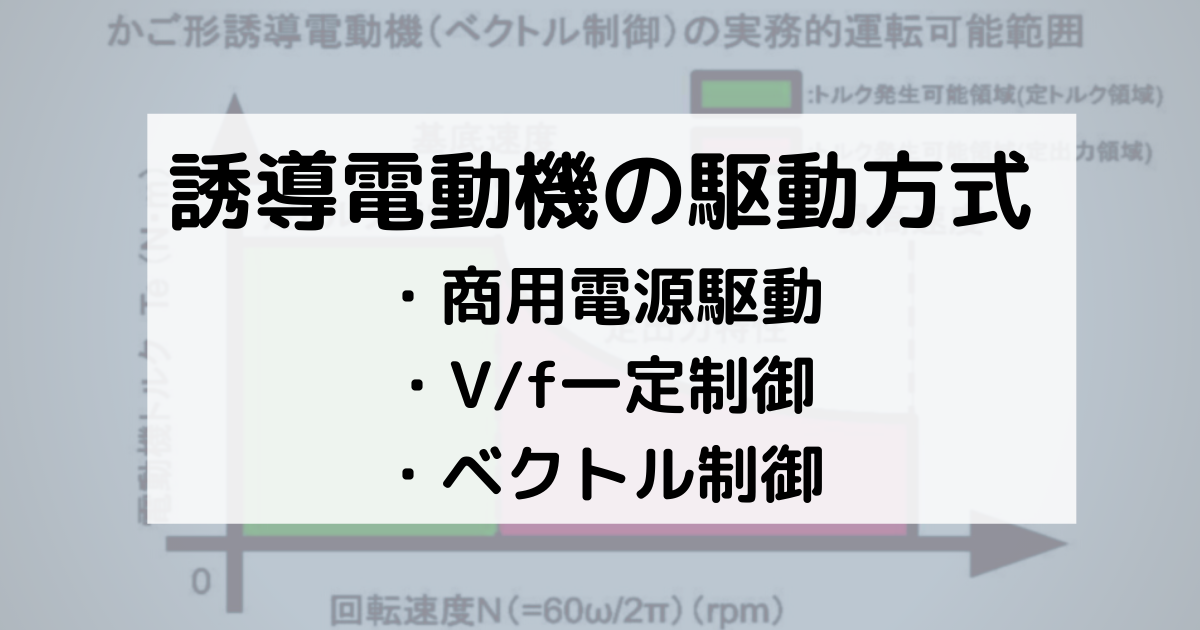
三相かご形誘導電動機(誘導モータ、Induction Motor、IM)の駆動方式について、機械系エンジニアの視点で紹介します。
この記事では、「商用電源駆動」「V/f制御」「ベクトル制御」というかご形誘導電動機の3つの基本的な駆動方法を紹介します。主に機械システムの観点から、誘導電動機について着目すべき点を述べます。この記事によって、誘導電動機の駆動方式を網羅的に把握できる構成としています。
各駆動方式のイメージや、駆動方式間の差異を把握できれば、直流電動機(DCモータ)、同期電動機*1を含めて、他の回転電気モーターの着目点も把握できると思います。
三相かご形誘導電動機とは?
三相かご形誘導電動機とは、電気を利用してトルクを発生し、回転運動を行う機械です。このため、機械を駆動する原動機として利用されます。動作原理は以下のYouTube動画がイメージしやすいと思います。
三相誘導電動機の大きな特徴は、「商用電源駆動」と「インバータ駆動」の両方が行える点です。また、インバータ駆動の制御方式としては、「V/f制御」と「ベクトル制御」の大きく分けて2つの方式が主に採用されています。このように、三相誘導電動機の駆動方式は多様です。
各駆動方式の制御の特徴
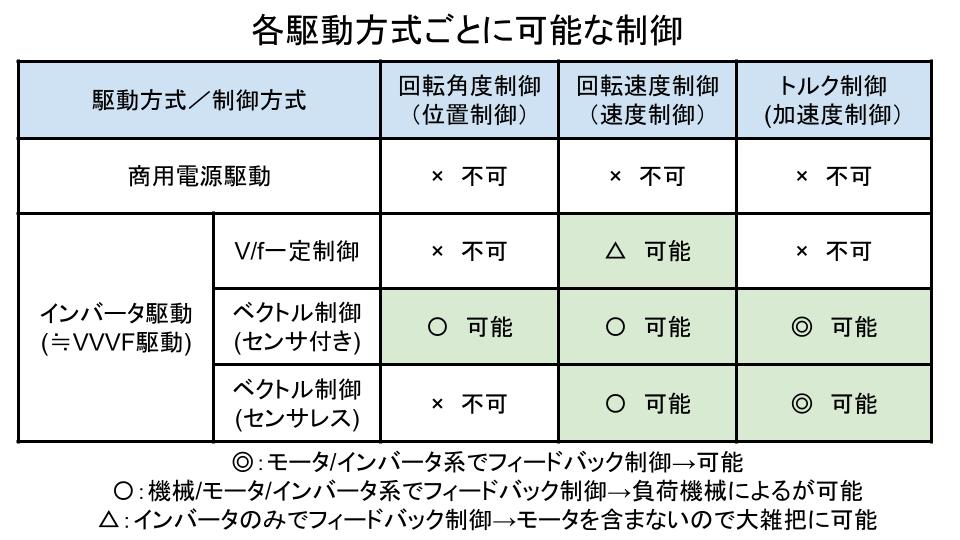
各駆動方式の制御の特徴を大雑把にまとめると以下のようになります。以下では、誘導電動機で駆動する機械を、単に「機械」または「負荷機械」とします。
商用電源駆動の概要
商用電源駆動では、定常時に一定速度の運転となります。このため、速度の制御は行えません。また当然ながら、角度(位置)、トルク(加速度)の制御も行えません。
V/f制御の概要
V/f制御では、電源の周波数を制御します。一般的にインバータのみでのフィードバック制御とします。誘導電動機の定常時の回転速度は、およそ電源周波数に比例します*3。このため、電源周波数を目的の値となるようにインバータを制御することによって、誘導電動機の回転速度をおおまかに制御することができます。
ベクトル制御の概要
ベクトル制御では、モータに流す電流を制御することでトルクを制御します*4。トルクの制御は、モータ/インバータを含めたフィードバック制御によって実現します。
ベクトル制御では、トルク指令値の算出に、機械を含めた含めた運動方程式を用いることで、回転速度制御や位置制御が行えます。これは、機械/モータ/インバータ系でのフィードバックによって実現します。
機械を含めてフィードバックを行う場合、通常であれば回転角度計や回転速度計が必要です。しかしながら、トルク制御や回転速度制御であれば、回転角度計や回転速度計が不要なセンサレスベクトル制御というも手法が存在します。
機械モデルのイメージ
この記事では、機械系のモデルとして以下の図の物を持ちます。
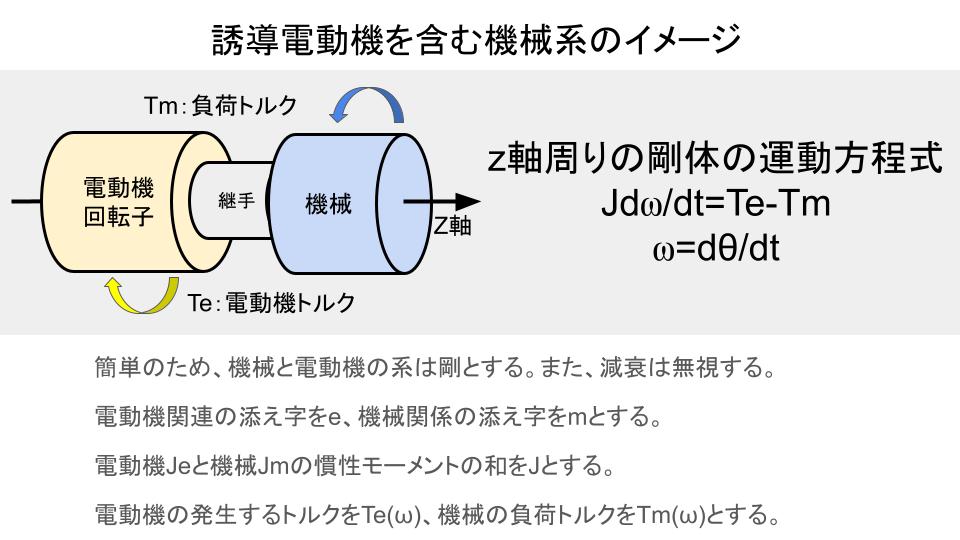
剛体の一軸周りの回転運動をモデルとします。回転運動の運動では、回転加速度(加速度)\(\dot{\omega}=\ddot{\theta}\) (rad/s2)、回転速度(速度) \(\omega=\dot{\theta}\)(rad/s)、回転角度(位置)\(\theta\) (rad)の3つの値が登場します。トルクと回転角速度は比例します*5。回転速度は、回転角速度の積分値です。回転角度は回転速度の積分値です。
三相誘導電動機の駆動方式をイメージする際には、この3つの値を分けて考えることが重要です。
上記の図中の運動方程式や3つの値\(\dot{\omega}\) (rad/s2)、\(\omega\) (rad/s)、\(\theta\) (rad)をイメージしながら以下進めます。
商用電源駆動
まず商用電源駆動における、三相誘導電動機の特性を紹介します。
商用電源駆動の電動機トルクを決定する要因
ある三相誘導電動機が発生できるトルクは、大まかに次の4つの変数で決まります*6。4つの変数とは、モータに印加する電源電圧 V(V)*7、電源周波数f(Hz)、電動機の回転速度\(\omega\) (rad/s)、機械の各部の温度T(K)*8です。
商用電源駆動では、電源電圧V(V)、電源周波数f(Hz)は例えば400V、50Hzのように決まっています*9。また、定常時にはモーター各部の温度も一定となります*10。結果的に、誘導電動機の定常時のトルク\(T_e\)は、電動機の回転速度\(\omega\) (rad/s)のみに依存します*11。逆に、電動機の回転速度\(\omega\) (rad/s)が決まると、トルクが決まります。
三相誘導電動機のトルク-速度特性
以上のことから、電動機トルクは、回転速度
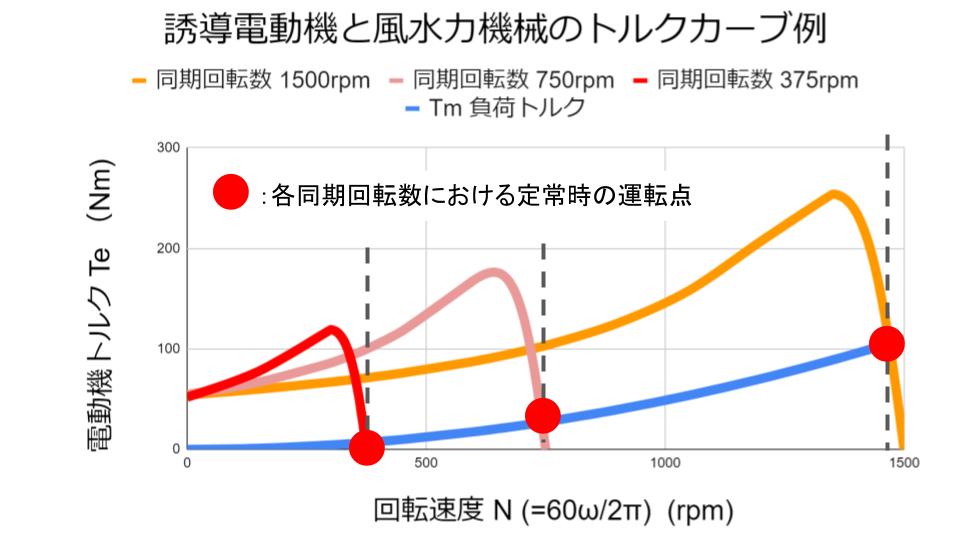
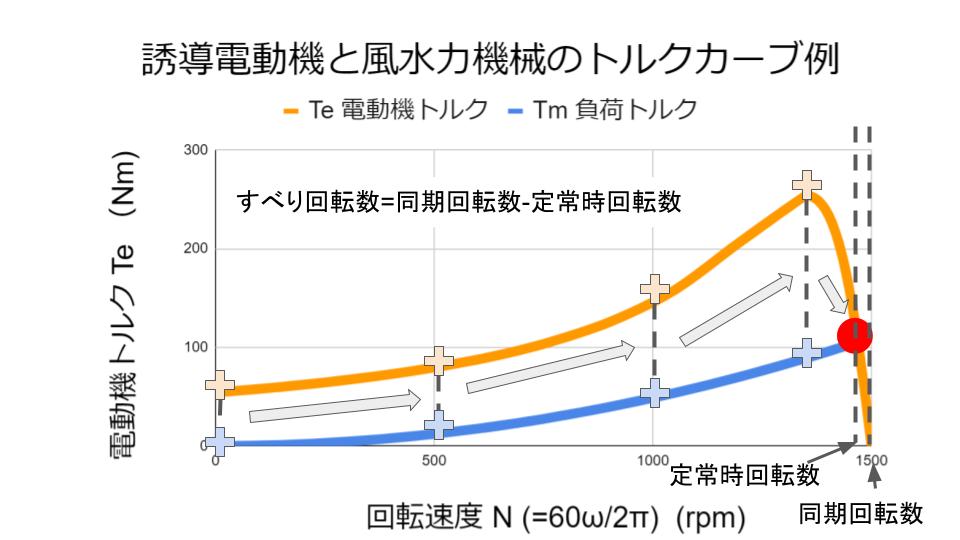
のみの関数で表されます。このグラフは、誘導機のトルク-速度特性(トルクカーブ)と呼ばれ、以下のような形状となります*12。誘導電動機は、以下の図のオレンジの線上でのみ運転可能です。線上のみしか運転できない点がポイントです。
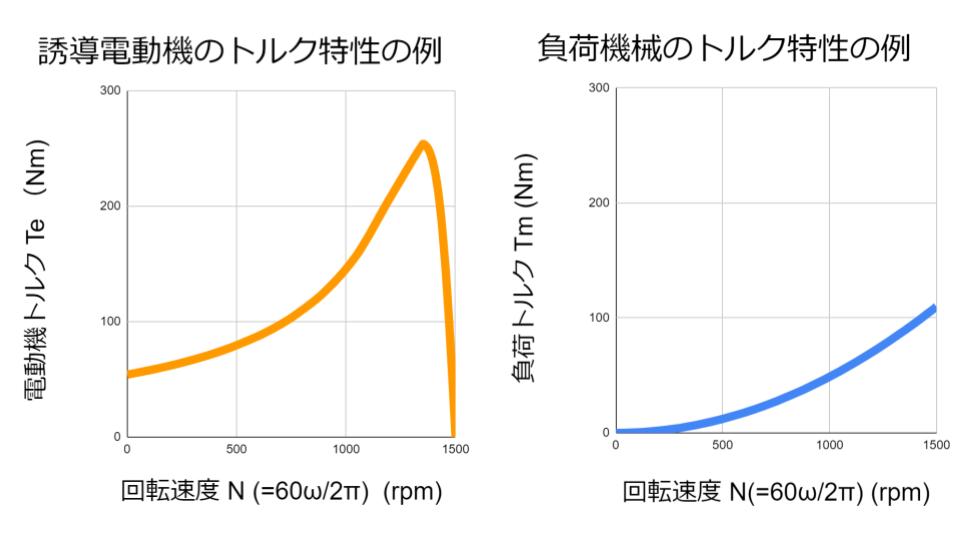
ポンプなどの風水力機械の負荷トルク\(T_m\)が、回転速度の二乗に比例するとした場合の図も上図に併記しています。風水力機械も、青い線のみが運転点となります。青い線の上下の領域ではともに定常運転できません。
商用電源駆動時の定常運転点
以下の図のように、電動機トルクとポンプトルクの交差する赤い点のみが定常時に運転可能な点となります。このため、誘導電動機の商用電源駆動では、一定の回転速度でしか運転できません*13。定常時の回転数は、商用電源の周波数で決まる同期回転数*14よりも少し小さい値となります。

V/f制御
次にV/f制御の特徴を紹介します。
V/f制御は、商用電源駆動と基本的な考え方は同じですが、制御できる項目が一点増えます。商用電源駆動では、回転速度は同期速度*15に近い値となります。V/f制御では、欲しい回転数を元に計算した周波数fの電圧を、インバータによって誘導電動機に印加します*16。これによって、V/f制御では望みの回転速度に近い回転速度で、誘導電動機を運転します。電動機に回転速度計は不要です*17。
イメージを以下の図に示します。同期回転数を変更することで、赤丸で示した定常運転時の回転速度を変更することができます。
V/f制御で制御するパラメータ
V/f制御では、周波数fという変数があります。周波数fを時間的にどのように変化させるかは、運転パターンや駆動する機械の機械的なパラメータ(慣性モーメント、剛性など)から決めます。このため、時間的にどのように周波数fを変化させるかは、機械系エンジニアが決定する必要がある事項です*18。V/f制御の周波数fは、インバータのみのフィードバック制御なので、望みの周波数変更が可能かは、インバータ系での確認事項です。
V/f制御の弱点
V/f制御は、数%以内という大雑把な回転速度制御ができ便利です。しかし、以下の3つの弱点があります。
弱点①:問題周波数f、電圧Vを小さくするほど、電動機の発生できる最大トルクが小さくなる*19。
弱点②:すべりが生じるため、電動機回転速度が同期回転速度から数%ずれる*20。
弱点③:電動機の運転温度によって、各周波数fごとに電動機の発生するトルクが変化する*21。
三菱インバータの制御モード
なお、例えば三菱インバータの制御モードで、基本的な考え方がV/f制御であるものは、以下の4つがあります*22。
三菱インバータの制御モード(基本的な考え方がV/f制御のもの)
・V/f制御
・汎用磁束ベクトル制御 *23
・アドバンスト磁束ベクトル制御*24
・最適励磁制御*25
各制御方式の特徴を、上記の弱点とあわせてまとめると以下の表となります。基本的にはアドバンスト磁束ベクトル制御*26、ポンプやファンの低負荷運転の際は最適励磁制御をおこなうと良いようです。
| 制御方式 | V/f制御 | 汎用磁束ベクトル制御 | アドバンスト磁束ベクトル制御 | 最適励磁制御 |
|---|---|---|---|---|
| 基本的なイメージ | V/f制御 | V/f制御 | V/f制御 | V/f制御 |
| 弱点①への対応 | なし(トルクブースト要) | あり | あり | なし |
| 弱点②への対応 | なし | なし | あり | なし |
| 弱点③への対応 | なし | なし | あり | なし |
| 軽負荷時の最大効率運転 | なし | なし | なし | あり |
ベクトル制御
ベクトル制御は、電動機トルクの制御の行える制御方式です。電動機のトルクを制御する際には、電動機の回転速度の情報が必要です。このため、回転速度計か回転角度計をとりつけで実測する方法があります。回転角度計をとりつける場合は、目標角度を決めて機械システムとしてフィードバック制御(回転角度制御、位置制御)を行うことができます。
センサレスベクトル制御
電動機回転速度の情報を得る方法としては、電動機の等価回路定数、電動機モデル及び電流実測値から推定する方法もあります。この場合は、精度が落ちますが回転速度計が不要となります。このように回転速度計が不要なベクトル制御を、速度センサレスベクトル制御といいます。ただし誘導電動機の場合、回転角度計なしでの回転位置の推定ができないため、回転角度はセンサレスで制御できません*28。
ベクトル制御最大の特徴:トルク制御
ベクトル制御では、基本的に任意の回転速度とトルクの組み合わせを瞬時に実現*29できます。このことから、機械システムの運動方程式を考慮することで、過渡的な運動を含めた制御が可能です。これがベクトル制御が、V/f一定制御や商用電源駆動と最も大きく異なる点です。
瞬時に電動機のトルクを制御できるため、機械系を含めて(剛性などを考慮して)トルク指令値を決定する必要があります。これは機械系エンジニアが行う必要がありますが、かなり制御の自由度が高いです。汎用インバータでも、PID制御のゲイン調整などを行えるようです。
ベクトル制御の制約
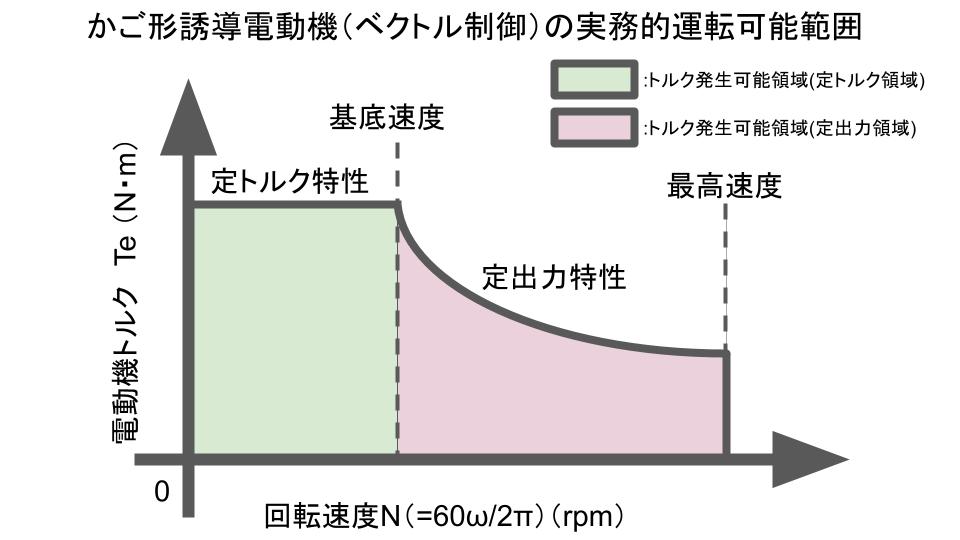
ベクトル制御では、基本的に任意の回転速度とトルクの組み合わせが実現できますが、制約が存在します。機械システムの制御を考える際には、この制約内でトルク指令を与える必要があります。以下の図にトルクの実務的制約範囲を示します。薄い緑色とピンクの範囲が、電動機がトルクを発生できる範囲です。この範囲内で、トルクを制御する必要があります。
ベクトル制御の運転可能範囲の決定要因
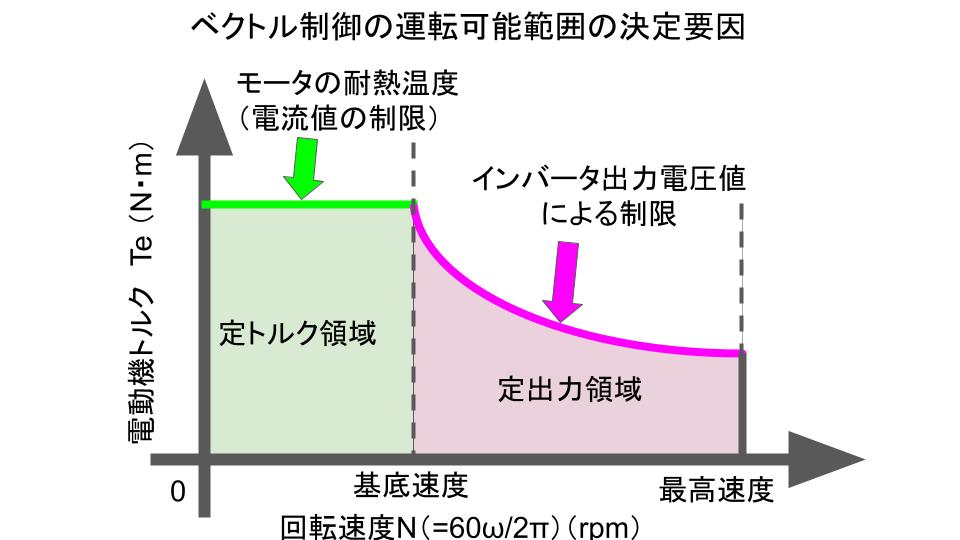
上記の図で実務的運転範囲としているのは、直流機の制御方式にならって簡単な表示をおこなっているためです*30。定トルク領域は、耐熱温度(電動機の電流制限*31)で決まります。また、定出力領域は、インバータの出力可能な電圧によって決まります。まとめると、以下の図のようになります。機械系エンジニアとしては、運転したいトルク範囲が含まれるように以下の図を作成すればよいようです*32。
ベクトル制御の運転可能範囲に関する+α
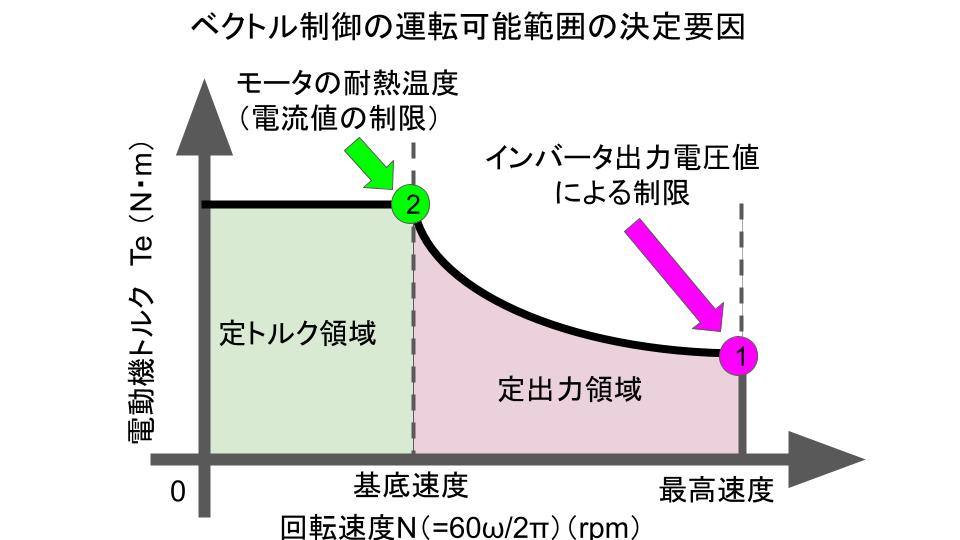
また、機械系エンジニアにとっては蛇足になりますが、金東海著の現代電気機器理論によると、以下の丸で示した2点が特に電動機/インバータ系として厳しい条件のようです。ピンク色の①の点は、インバータの出力可能電圧で決まります。このため、短時間であっても電動機トルクの上限を上げづらいのだろうと推測できます。一方、黄緑色の②の点は、耐熱温度で決まります。このため、短時間であれば電動機トルクの上限を上げやすいだろうと推測できます。
サーボモーターの互換性
機械システムの観点では、ベクトル制御の誘導電動機、巻線形同期電動機、永久磁石式同期電動機、直流電動機は同様の扱いが行えます。つまり、いずれの電動機でも制約の範囲内で、瞬時に指定のトルクを出力することができます。このような電動機をサーボモーターといいます*33。サーボモーターが機械系として、一般的に重要な情報は以下の二点となります。
考慮点①:トルク-回転速度の2軸内で、運転できる範囲
考慮点②:慣性モーメント、軸のねじり剛性などの軸の機械的パラメータ
V/f制御とベクトル制御の違い
改めてV/f制御とベクトル制御の違いを以下の図にまとめます。
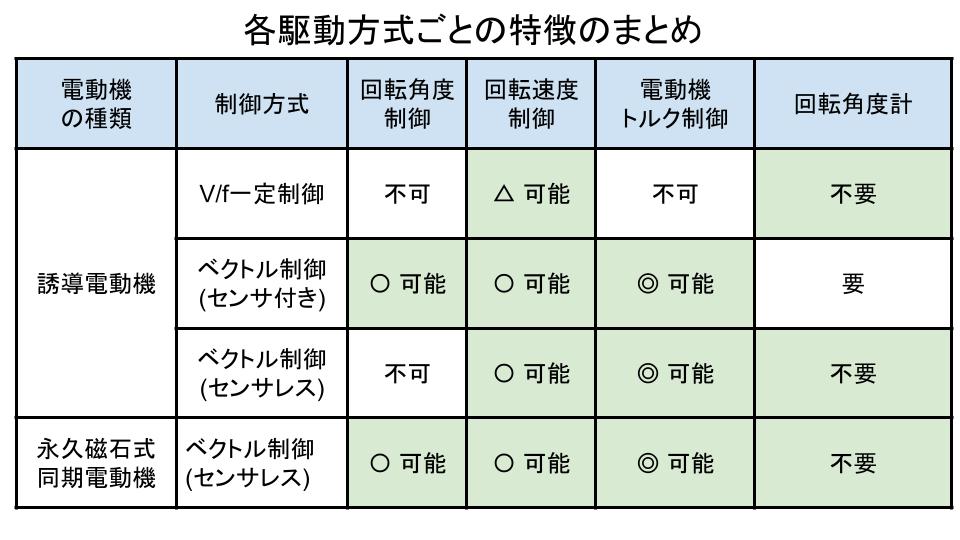
V/f制御では、定常時のおおよその回転速度を制御できます。一方、ベクトル制御は、瞬時瞬時の電動機トルク制御を行えます。このため、ベクトル制御では回転速度制御も行えます。ただし、誘導電動機(IM)のセンサレスベクトル制御では、回転角度制御(位置制御)はできません。一方、永久磁石式電動機(PM)であれば、回転位置センサレスベクトル制御が行えます。
機械系が関連する事項
電動機及び制御関連で、機械系に関連する事項を改めて以下の表にまとめます。
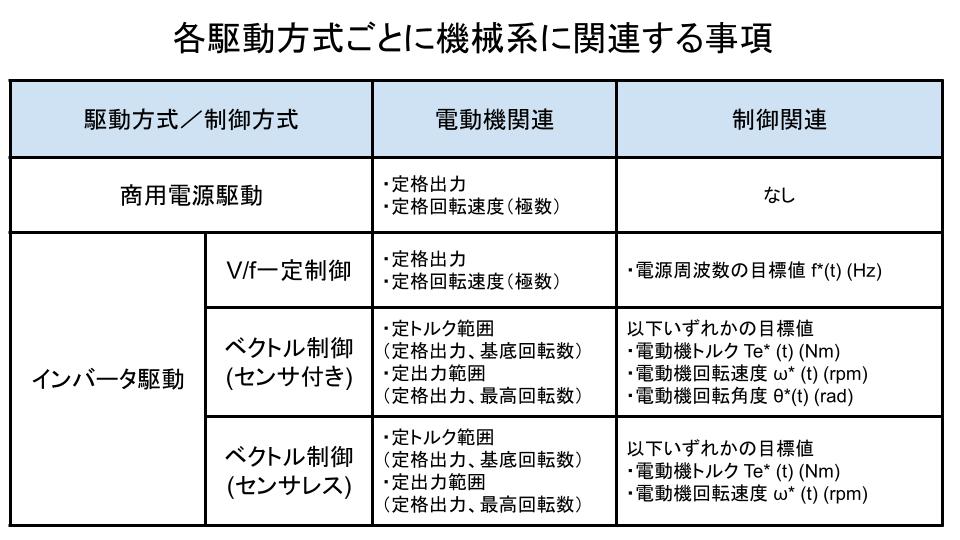
機械の基本的な特性から、電動機の選定に必要な情報を決定します。また、機械システムとしての運転パターンから、電動機/インバータ系および制御に関連する内容を決定していきます。
商用電源駆動は決定事項は少ないですが、ベクトル制御では決定事項がかなり多くなります。ベクトル制御で行えることの全ては、汎用インバータで行えません。このため、汎用インバータで行える範囲の確認も重要です。
回生コンバータってなに?
最後に、電源回生に関して簡単に紹介します。
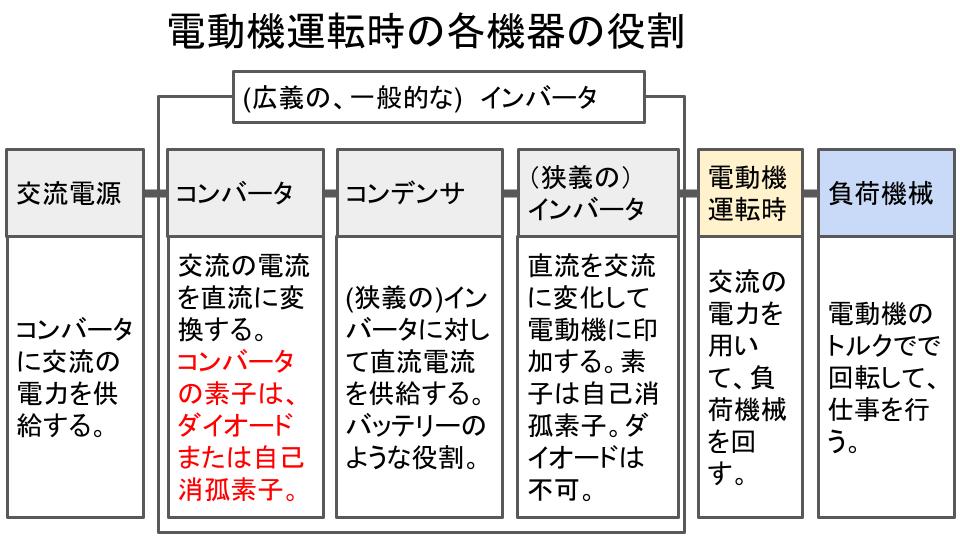
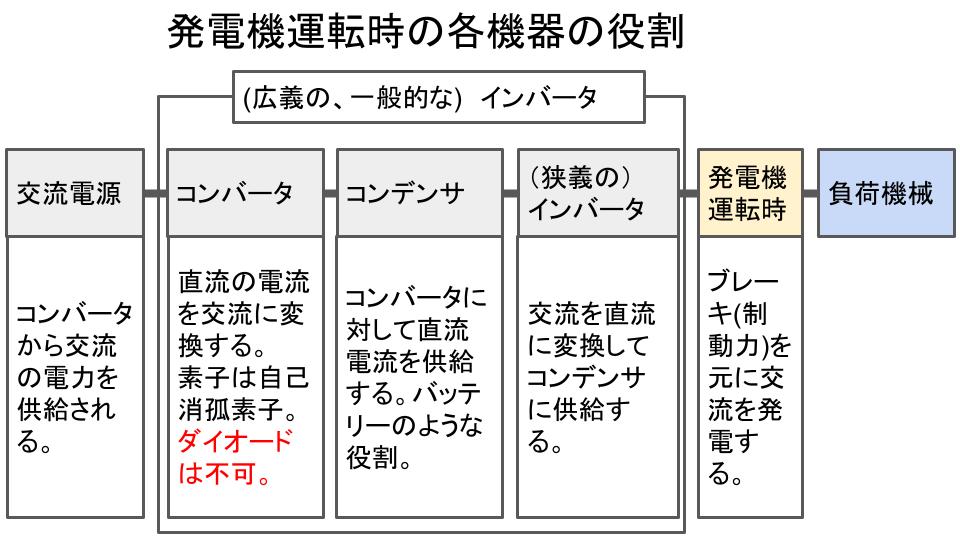
電源回生は、電動機を発電機動作をおこなうことで、ブレーキをかける動作です。電源回生は、消費電力を低減できます。電源回生時には、コンバータがインバータの動作を行います。インバータは素子として自己消孤素子でないダイオードが使えません*35。このため電源回生を行うときは、インバータ動作を行えるコンバータを取り付ける必要があります。このコンバータが、電源回生コンバータです。
以下の図のように電動機運転を行うだけの場合は、コンバータの素子はダイオードで可能です。一方、インバータの素子は自己消孤素子である必要があります。
一方、電源回生を行う場合は、電動機は発電機動作を行います。この場合、コンバータはインバータ動作(直流から交流への変換)を行う必要があるため、自己消孤素子を用いる必要があります。
おわりに
この記事では、三相誘導電動機の駆動方式に関して、機械系エンジニアの立場から大雑把に解説しました。電動機は、モータ/インバータ系のフィードバック制御によってトルク値を瞬時に制御できるものが多いです。しかし、かご形誘導電動機の場合には、様々な駆動方式があります。これらの駆動方式の違いは、機械系エンジニアにも関連することです。
また、たまたまネットの海で、見つけた三菱INVニュースの資料の情報をあわせています。また、最後に参考となった書籍も紹介しております。情報が参考になればと思います。
参考とした三菱INVニュース
・三菱汎用インバータの各種制御方式
https://www.mitsubishielectric.co.jp/fa/document/technews/inv/mf-p-048/mfp048.pdf
・最適励磁制御について
https://www.mitsubishielectric.co.jp/fa/document/technews/inv/mf-e-006/mfe006.pdf
・製品特長 インバータ|FREQROL
参考文献
この記事の内容を書く際にベースとなった図書を貼っておきます。道しるべ的に利用していただけたらと思います。
■電磁気学(物理テキストシリーズ)

電気モータの原理は、運がいいことに電磁気学で多く説明されます。電磁気学現象の入門書です。大学一年レベルの微積が前提知識となります。
■電気回路理論入門
")
電気回路は、電磁気学をもとに、現象をさらに少ないパラメータで表現できるようにした学問です。古典的な電動機の理論は、電気回路の理論に基づいています。このため、電気回路理論の知識が役に立ちます。大学一年レベルの微積と電磁気学の初歩が前提知識となります。
■徹底解説 電動機・発電機の理論

電気回路を用いた古典的な手法で、電動機・発電機の理論を紹介しています。電気回路を用いた電動機の理論を広く把握できるようになります。誘導電動機であれば、商用電源駆動やV/f一定制御に関して理解できるようになります。ベクトル制御の内容は含まれていません。電気回路と電磁気学の初歩が前提知識となります。出版社がネット上に公開しているページも便利です。

■日本電気技術者協会ホームページ

大雑把に電気系の情報を確認する上で便利なホームページです。
■現代電気機器理論

ベクトル制御における電動機モデルの導出を確認できます*36。古典的な電動機の理論、電磁気学の初歩及び古典制御の初歩が前提知識となります。
■ACドライブシステムのセンサレスベクトル制御

電動機のベクトル制御とセンサレスベクトル制御の概要について確認できます*37。前提となる知識は、ベクトル制御における電動機モデル、パワエレの理論及び古典制御と思っています。
■フィードバック制御系入門

古典制御の基礎を学べます。前提知識は、大学一年レベルの微積です。
■Motor Fan illustrated Vol.184

電気自動車向けのモーターについて紹介されてます。機械システムの中での電動機のイメージを深めることができると思います。この本のなかでは、埋込磁石同期モーターに関するトルク特性(トルク-回転速度特性)がガソリンエンジンと比較されながら記載されています。
■トランジスタ技術 2022年2月号

MATLAB/Simulinkを用いたモータ物理シミュレーションの方法が紹介されています。物理モデルは天下り的に導入されますが、Simulinkでの機械を含むシミュレーションの方法を知ることができます。本に基づいて操作を行うだけであれば、前提知識は必要ありません。

■振動工学の基礎

振動工学の基礎が紹介されています。振動工学は、機械の特性(質量、剛性、減衰比など)から振動の特徴を抽出する工学です。機械の設計上の指針を得ることができます。電動機のトルク制御を行って、機械を駆動する際には過渡的な運動が重要になります。このときに振動や騒音に着目する必要がある場合は、振動工学の知識が必要です。前提知識は、力学の初歩、大学一年レベルの微積/線形代数の知識です。


*1:ブラシレスDCモータも同期電動機です。
*2:V/fでブイバイエフと読みます。Vf(ブイエフ)制御、Vf(ブイエフ)一定制御と呼ばれることもあります。また、古くからある制御方式のため、V/f制御のことを指してインバータ制御やVVVF制御ということもあるようです。ベクトル制御も、VVVFインバータを利用した制御方式です。
*3:回転速度は、同期回転数の(1-すべり)倍となります。同期回転数(rpm)は、電源周波数(Hz)を60/p倍したものです。ここでpは電動機の極対数です。すべりは、機械の回転数-トルク特性に依存しますが、0.01程度の値です。
*4:モータに印加する電圧を制御することで、モータに流れる電流を制御します。ベクトル制御では、印加する電圧の大きさ(スカラー)だけでなく、電圧を印加するタイミング(位相)も制御します。このため、ベクトル制御と呼ばれるようです。なお、ベクトル制御には細かく分けると多くの手法が存在するようです。
*5:機械系を一つの剛体と仮定しているためです。通常は、機械の剛性などのパラメータによっては共振などの振動が生じます。このため、現実にはトルクと回転角速度は比例しないこともあります。
*6:ここでの導入が天下り的ですが、あとに紹介する発電機・電動機の理論や現代電気機器理論などで導入されています
*7:商用電源の基本波のみを考え、その波の実行値。例えば50Hz地域では、電圧の50Hz成分の実行値。
*8:温度が変化すると電気抵抗が少し変化します。このため、トルクも少し変化します。
*9:周波数は地域によって決まります。オフグリッドの場合でも、同期発電機の回転数によって決まります。変圧器などで、電源電圧は変更可能ですが、電源電圧は決定した後とします。
*10:定常状態の定義よりそうなります。
*11:温度による変化を無視すると、定常時でなくても成立します。
*12:L型等価回路の場合です。トルクモータパラメータは、現代電気機器理論に記載のものを利用しました。
*13:一応、加速の仕方を以下に示します。以下のように電源を入れると自然と加速が開始し、最終的に赤いポイントにいたります。
商用電源駆動時の誘導電動機の加速
*14:の関係があります。ここで、
は同期角周波数、
は電源周波数、
は極対数です。
*15:同期速度は、電源周波数と電動機の構造(極数)で決まります。
*16:電圧は過励磁とならないようにV/fが一定となるようにします。なお、インバータ出力電圧には上限があります。このため一定以上の周波数fに対しては電圧Vは最高値Vmaxで一定とします。
*17:シンプルなV/f一定制御では、インバータの電源周波数fと電源電圧Vを制御します。電動機からの情報は不要であることからも、V/f制御にて回転速度計が不要なことがわかります。
*18:汎用インバータでも、加速のさせ方は、大雑把に設定できます。
*19:トルクブーストをすることで低速回転速度時のトルクの低下は回避できます。
*20:例えば、ポンプの回転数が1%低いと、ポンプの流量は3%低くなります。
*21:温度が変化すると、導体の電気抵抗が高くなります。これによって、電動機のトルク特性が若干変化します。このため、回転速度が若干へんかします。
*22:ネット上の三菱INVニュースを主に参照しています。誤りがある可能性があります。他にも過去には、磁束ベクトル制御というものがあったようです。
*23:弱点①を克服しています。このため、低回転数字のトルクの低下が小さいようです。
*24:弱点①②③を克服しています。トルクの低下、回転速度のズレ、トルクの温度依存性が補正されているようです。(https://www.mitsubishielectric.co.jp/fa/document/technews/inv/mf-p-048/mfp048.pdf)https://www.mitsubishielectric.co.jp/fa/document/technews/inv/mf-p-048/mfp048.pdf
*25:効率を最大化する制御です。トルクは、磁束と電流の積です。V/f一定制御制御では、磁束が一定となるように励磁します。このため、トルクが小さい場合は、小さな電流となります。磁束の大きさは鉄損の大きさを決め、電流の大きさは銅損の大きさを決めます。効率が最も大きくなるように、磁束の大きさと電流の大きさを決めることを最適励磁制御と呼んでいるようです。ポンプやファンなどの小さな負荷の場合、V/f一定では磁束一定のため鉄損が出力のわりに大きくなります。これを防ぐことができるというのが、大大雑把な内容だと思います。(https://www.mitsubishielectric.co.jp/fa/document/technews/inv/mf-e-006/mfe006.pdf)https://www.mitsubishielectric.co.jp/fa/document/technews/inv/mf-e-006/mfe006.pdf
*26:もしくは、汎用磁束ベクトル制御。簡単にイメージしたい場合は、V/f制御でトルクブーストありとする。
*27:三菱INVニュースより
*28:永久磁石式同期電動機の場合は、位置センサレスベクトル制御が行えるようです。
*29:機械系の時定数と比較した場合、トルクを発生する電気系の時定数はかなり短いようです。
*30:金東海著の現代電気機器理論によると、ベクトル制御は直流機の特性を模擬できるようにと考えられているようです。このため、直流機の制御で行われる定トルク制御、定出力制御を模擬するようなかたちとなっているようです。このため、本当に電動機トルクが出せる範囲はもう少し広くなります。
*31:金東海著の現代機器理論では、電流制限とあります。motor fan illustratedのモーター回では、耐熱温度制限とあります。電気工学では、温度を決めるものとして模擬的に電流で定トルク領域を定めているようです。冷却能力を上げれば、電流の制限値は大きくできるようです。
*32:その後は、電動機/インバータ系とやりとりする。
*33:慣性モーメントが小さいもののみを指す場合もあります。
*34:分類は、 本ページと書籍の中での対応は以下のようなものとなります。書籍では、FA企業の商品展開に近い表記となっているようです。
「本ページ」↔「書籍」
「商用電源駆動」↔「誘導モータ」
「インバータモータ」↔「インバータ駆動V/f一定制御」
「インバータ駆動ベクトル制御」↔「サーボモータ」
なお、書籍中のサーボモータは、誘導モータ以外も含まれます。
*35:パワエレ系の本はチラチラ読んでますが、理由はよくわかってないです。
*36:まだ、完全には理解できていません
*37:まだ、完全には理解できていません。現代電気機器理論やパワエレの教科書を一通り理解できてかなと思ってます

