FAおよび機械システムにおける回転型電動モータを網羅的に紹介します。駆動される機械を含め、FA/機械システムの視点から、各モータのトルクカーブ(トルクー回転速度特性)の見方や各モータでできることをまとめています。
FA(工場自動化、Factory automation)では、駆動装置(アクチュエータ)が欠かせません。自動でモノを動かしたり、自動で加工を行ったりするのに駆動装置が必要だからです。しかしながら、全ての製品をラインナップする企業が少ないこともあり、各モータの違いはわかりづらいです。
そこで、この記事では回転型電動モータ(以下、モータ)を、FA/機械システムの観点から網羅的に分類し、その特長を紹介します。この記事によって、回転型電動モータを俯瞰して把握できる構成としています。
モータの分類
FA/機械システムを駆動するという機能の点から考えるとモータは、以下の大きく4つに分類できます。サーボモータやステッピングモータは高度な制御を行えるという特長があります。
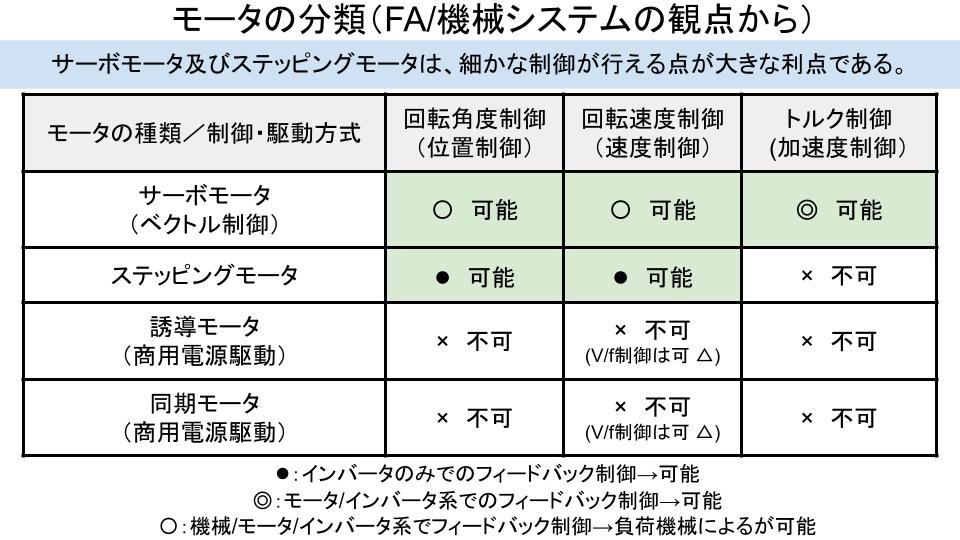
サーボモータは瞬時にトルクの制御が行えるモータの総称です。おおよそインバータと組み合わせて使用されます。トルクを制御することで、回転速度や回転位置の制御を行うこともできます。
ステッピングモータは、回転角度を指定することができるモータです。一定時間ごとに角度を変化させることで回転速度を制御することもできます。
誘導モータや同期モータの商用電源駆動は、一定の速度でのみ運転できます。細かな制御は行えません。この記事では、広く普及している誘導電動機の商用電源駆動を紹介します。
FA/機械システムで使用される回転型モータは、以上の4分類で網羅できます。例えばトルクカーブ(回転速度ートルク特性)の見方は、分類ごとで全くことなります。この点についても紹介します。
サーボモータ
サーボモータは、瞬時のトルクの制御が行えるモータの総称です。インバータ及び制御装置との組み合わせで使用されます。
運動方程式を考えると分かるように、電動機トルクを制御することで、回転速度や回転角度を制御することができます。このため、機械系として高度な制御が必要な場合に用いられます。
自動車用のモータも、FA/機械システムで用いられるサーボモータとまったく同様の原理です。このため、以下の動画はサーボモータのイメージが掴みやすいと思います。
サーボモータの種類
瞬時のトルクの制御が行えるモータは、全てサーボモータです。サーボモータとして用いられるモータを網羅的に以下の表に示します。このうち汎用サーボモータとして多く用いられるのは、表面磁石同期モータです。
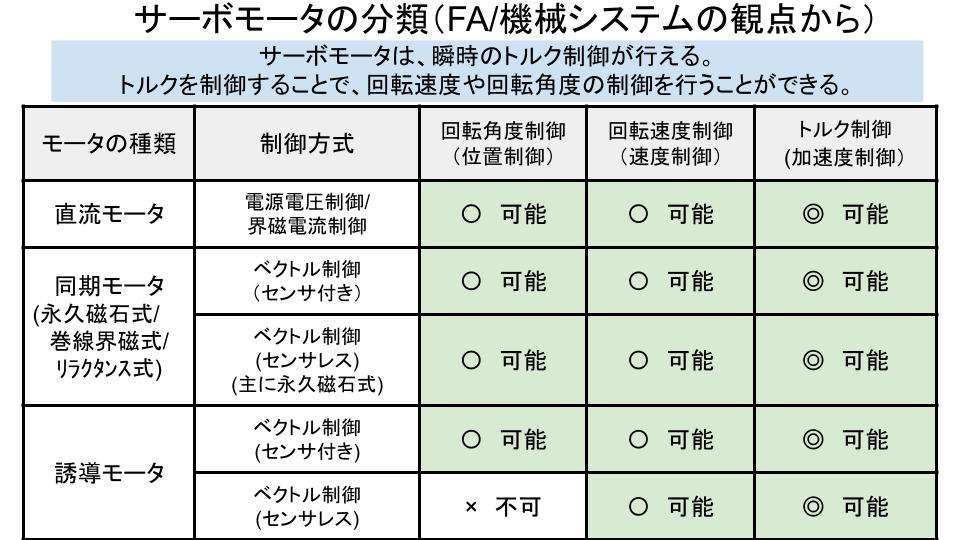
なお、一般にブラシレスDCモータと呼称されるモータは 、永久磁石式同期電動機です。直流電動機ではありません*1。
サーボモータごとの特長
サーボモータごとの特長を以下の図に示します。サーボモータはには、「大きなモータトルクが出せ」、「モータ慣性モーメントが小さく」、「トルクリプルが小さい」ことが求められます。このため、汎用サーボモータでは、相対的にこれらの特長を備えた表面磁石同期モータが多く用いられています*2。
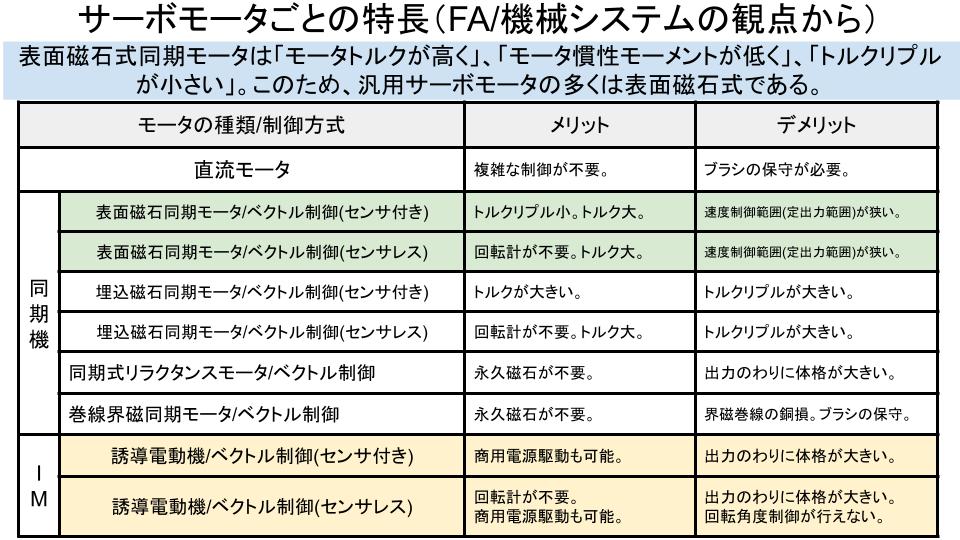
汎用誘導電動機と汎用インバータ(ベクトル制御対応)の組み合わせでサーボモータとすることも可能です。その他のモータは、汎用品としての入手性がやや低いです。
サーボモータのトルクカーブ(回転速度ートルク特性)の見方
サーボモータのトルクカーブは以下の図のようになります。このトルクカーブで薄い赤色で塗った範囲内であれば、モータは自由に瞬時のトルクを出力することが可能です。このモータトルクによって、回転速度や回転角度が制御できます。
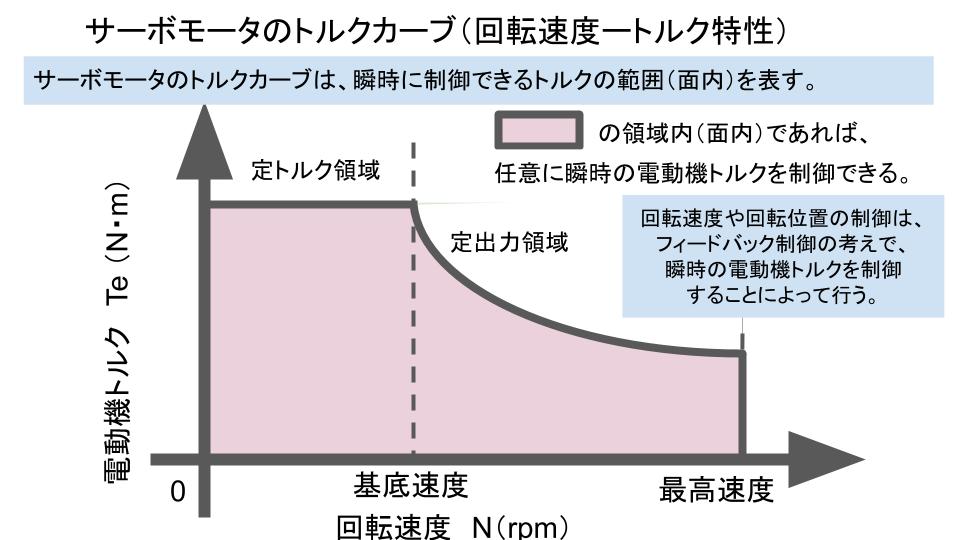
あとで述べますが、ステッピングモータや誘導モータ(商用電源駆動)のトルクカーブの見方とは全く異なるため注意が必要です。
ステッピングモータ
ステッピングモータは、電源のパルスによって回転角度を制御するモータです。このため、原理的に位置決めが可能です。また、パルスレートを変えることで回転速度も制御可能です。モータトルクを制御することはできません。
ステッピングモータの原理は以下のYouTube動画がイメージしやすいです。
ステッピングモータのトルクカーブ(回転速度ートルク特性)の見方
ステッピングモータのトルクカーブは以下の図のようになります。
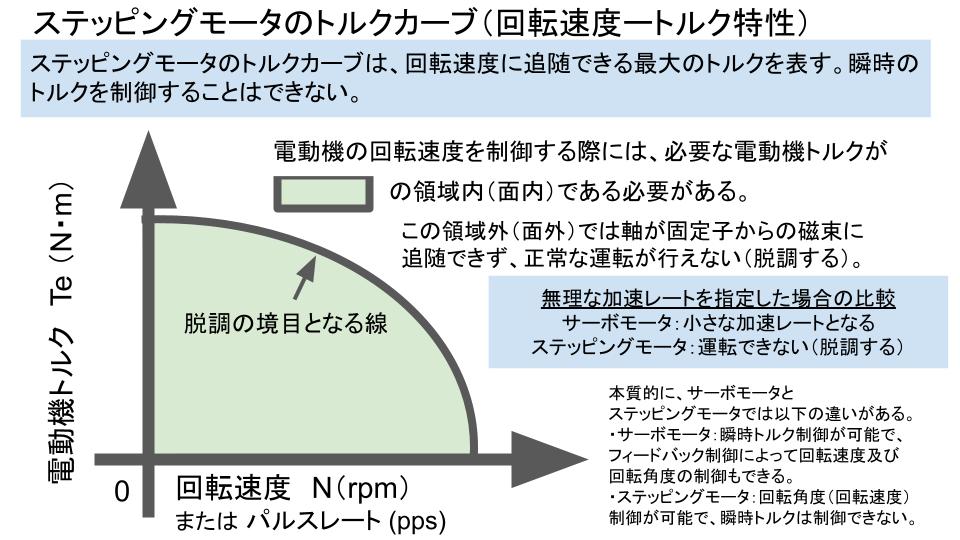
ステッピングモータでは、指定した回転速度の際に発生するモータトルクが、図の薄い緑の範囲内に収まっている必要があります。
サーボモータと異なり、意図してトルクを制御することは不可能です。サーボモータと比較した際に、ステッピングモータのトルクカーブを見るときに注意するべきなのはこの点です。
薄い緑色の範囲の外では、パルスによって生じる固定子からの磁束にモータの軸が追随できなくなります。この現象を脱調といいます。
ステッピングモータは原理的に脱調が避けられません。このため、FA/機械システムの設計段階で、予めどの程度のモータトルクが必要か検討する必要があります。
サーボモータとステッピングモータの違い
サーボモータとステッピングモータの比較を以下の図に示します。
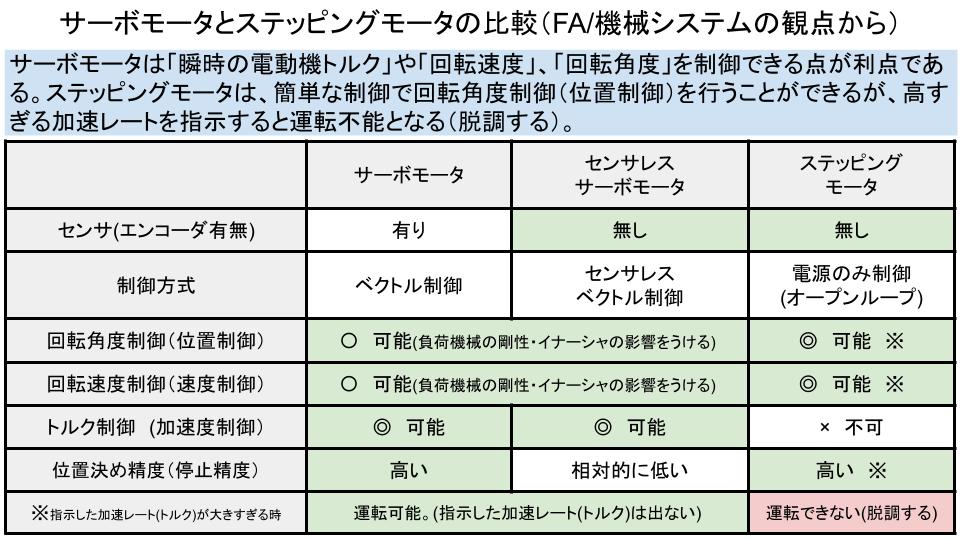
大きな特長として、サーボモータは「瞬時のモータトルクの制御」が行えます。
一方、ステッピングモータは、「エンコーダなしで高い位置決め精度」を得ることができます。
ステッピングモータは大きすぎる加速レート(トルク)となった場合に、脱調し、正常な運転ができないという大きな欠点があります。ステッピングモータは、発揮できるトルクが回転速度が早くなると小さくなります。このため、高い回転速度ではサーボモータに対して適用に不向きです*3。
また、以下のリンク先(三菱FA)のように工程上トルク制御が必要な場合はサーボモータを用いる必要があります。
技術的なサーボモータとステッピングモータの違いは、おおよそ上記の通りです。この他に、費用や入手性が検討事項となります。
誘導モータ(商用電源駆動・V/f制御)
誘導モータは、汎用モータとして利用されているモータです。原理は以下のYouTube動画がイメージしやすいです。
誘導モータは、多くの駆動方式を持ちます。以下の記事に三相かご形誘導モータの駆動方式を網羅的にまとめています。以下では概要を説明します。
誘導モータ(商用電源駆動)のトルクカーブ(回転速度ートルク特性)
商用電源駆動時の誘導モータのトルクカーブを以下に示します。誘導モータはオレンジ色の線の上のみで運転可能です。
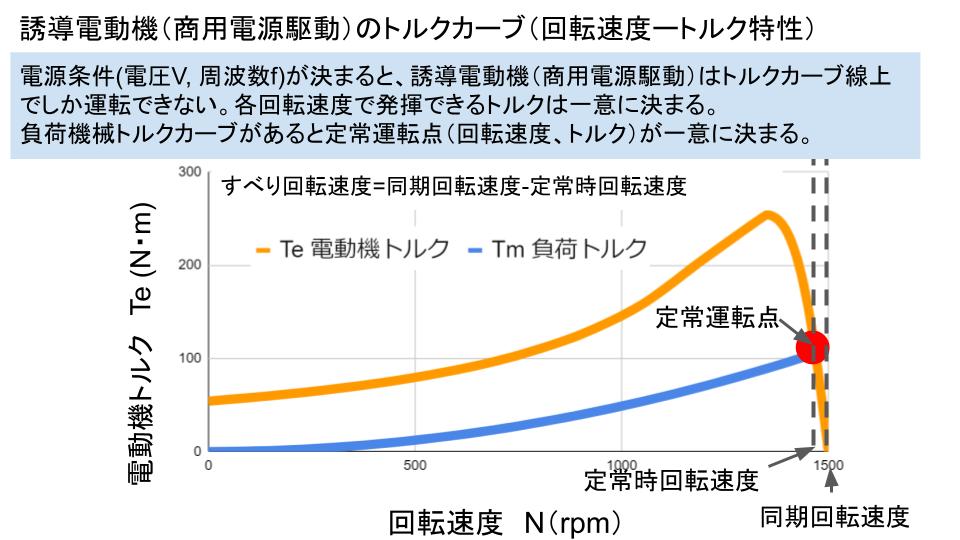
モータトルクとポンプトルクの交差する赤い点のみが定常時に運転可能な点となります。速度を制御することはできません。また、回転速度も同期回転速度から少しずれます。同期回転速度は、モータの構造(極数)と電源の条件(周波数)から決まるため、設計段階から確定します。
誘導モータ(V/f制御)のトルクカーブ(回転速度ートルク特性)
誘導モータのV/f制御のトルクカーブを以下に示します。V/f制御では、同期回転数を変化させることでモータの回転速度を制御します。
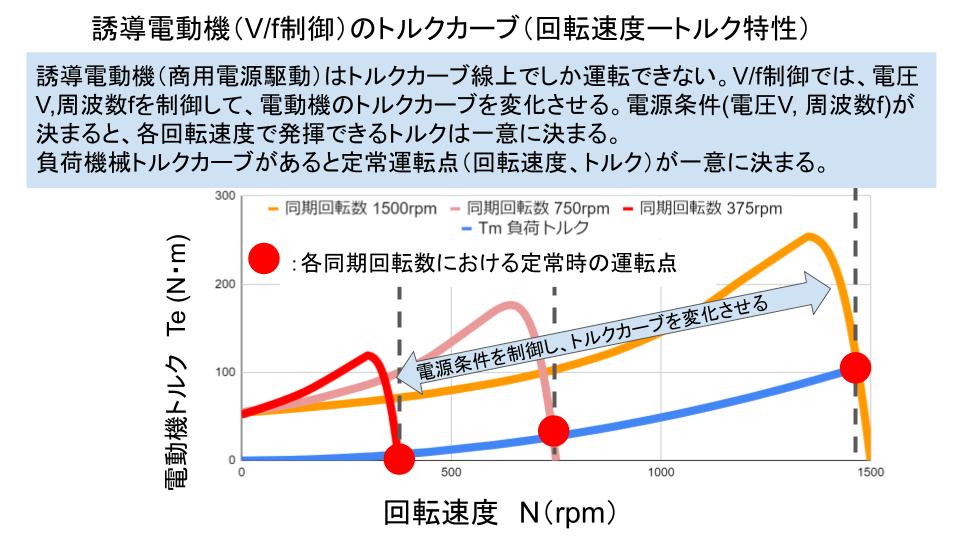
V/f制御の基本的な考え方は、商用電源駆動と同じです。実際の回転速度は、同期回転速度から少しずれてしまいます。
誘導モータの駆動方式
誘導モータの駆動方式をまとめて以下の図に示します。
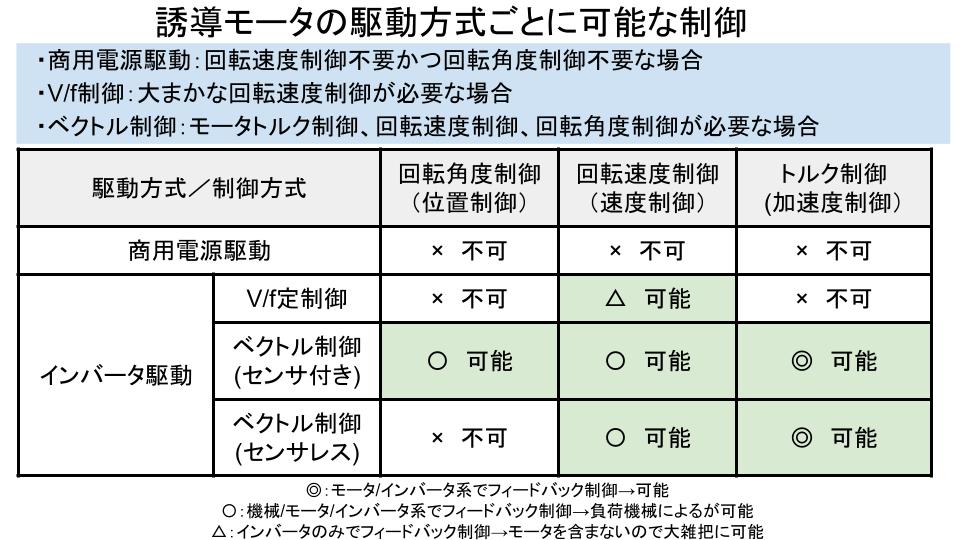
速度を制御する必要がなければ、商用電源駆動で対応可能です。
大まかな速度制御であれば、V/f制御で対応可能です。誘導モータ用の汎用インバータには、必ずV/f制御機能があります。
モータトルク制御、回転速度制御、回転角度制御が必要な場合は、ベクトル制御でサーボモータとして対応できます。高機能な誘導モータ用の汎用インバータには、ベクトル制御機能が搭載されています。また、サーボモータとして誘導モータを用いる場合は、サーボモータの項で述べた各モータや、ステッピングモータで代替できる可能性もあります。
まとめ
この記事では、FA/機械システムで用いられる回転型電動モータを網羅的に紹介しました。
制御が必要な時は、サーボモータやステッピングモータを用います。サーボモータとステッピングモータは原理が異なりますが、活用できる場面が被る場面が多いです。また、モータの種類によって、仕様の確認の際のトルクカーブ(回転速度ートルク特性)の確認方法が異なることも紹介しました。
また誘導モータは、駆動方式が多く駆動方式毎の特長を紹介しました。駆動方式によって、できることが大きく異なる点が特徴的です。
参考文献
この記事の内容を書く際にベースとなった図書を貼っておきます。道しるべ的に利用していただけたらと思います。
■電磁気学(物理テキストシリーズ)

電気モータの原理は、運がいいことに電磁気学で多く説明されます。電磁気学現象の入門書です。大学一年レベルの微積が前提知識となります。
■電気回路理論入門
")
電気回路は、電磁気学をもとに、現象をさらに少ないパラメータで表現できるようにした学問です。古典的な電動機の理論は、電気回路の理論に基づいています。このため、電気回路理論の知識が役に立ちます。大学一年レベルの微積と電磁気学の初歩が前提知識となります。
■徹底解説 電動機・発電機の理論

電気回路を用いた古典的な手法で、電動機・発電機の理論を紹介しています。電気回路を用いた電動機の理論を広く把握できるようになります。誘導電動機であれば、商用電源駆動やV/f一定制御に関して理解できるようになります。ベクトル制御の内容は含まれていません。電気回路と電磁気学の初歩が前提知識となります。出版社がネット上に公開しているページも便利です。

■日本電気技術者協会ホームページ

大雑把に電気系の情報を確認する上で便利なホームページです。
■現代電気機器理論

ベクトル制御における電動機モデルの導出を確認できます*4。古典的な電動機の理論、電磁気学の初歩及び古典制御の初歩が前提知識となります。
■ACドライブシステムのセンサレスベクトル制御

電動機のベクトル制御とセンサレスベクトル制御の概要について確認できます*5。前提となる知識は、ベクトル制御における電動機モデル、パワエレの理論及び古典制御と思っています。
■フィードバック制御系入門

古典制御の基礎を学べます。前提知識は、大学一年レベルの微積です。
■Motor Fan illustrated Vol.184

電気自動車向けのモーターについて紹介されてます。機械システムの中での電動機のイメージを深めることができると思います。この本のなかでは、埋込磁石同期モーターに関するトルク特性(トルク-回転速度特性)がガソリンエンジンと比較されながら記載されています。
■トランジスタ技術 2022年2月号

MATLAB/Simulinkを用いたモータ物理シミュレーションの方法が紹介されています。物理モデルは天下り的に導入されますが、Simulinkでの機械を含むシミュレーションの方法を知ることができます。本に基づいて操作を行うだけであれば、前提知識は必要ありません。

■振動工学の基礎

振動工学の基礎が紹介されています。振動工学は、機械の特性(質量、剛性、減衰比など)から振動の特徴を抽出する工学です。機械の設計上の指針を得ることができます。電動機のトルク制御を行って、機械を駆動する際には過渡的な運動が重要になります。このときに振動や騒音に着目する必要がある場合は、振動工学の知識が必要です。前提知識は、力学の初歩、大学一年レベルの微積/線形代数の知識です。




