直流モータ(以下、DCモータ、ブラシ付きDCモータ*1)のT-N特性(以下、トルクカーブ。回転速度-トルク特性、特性図、NT特性、TN特性)の見方を紹介します。
モータのトルクカーブとは?
トルクカーブとは、モータの発揮できるトルクと回転速度の関係を平面上にまとめた特性図です。
モータのトルクカーブは縦軸がトルク(N・m)で横軸が回転速度(rpm)であることは共通です。
DCモータの場合は、モータトルクは縦軸と横軸が入れ替わっていることが多いです。つまり、DCモータの場合は、横軸がトルク(N・m)で縦軸が回転速度(rpm)であることが多いです。
DCモータの分類
まず直流モータの分類を以下に紹介します。
フレミングの左手の法則でイメージされるように、モータは電流と磁束によって力を発揮します。磁束を発生させる方式を励磁方式といいます。
DCモータを、磁束の発生させる励磁方式で分類すると以下のようになります。
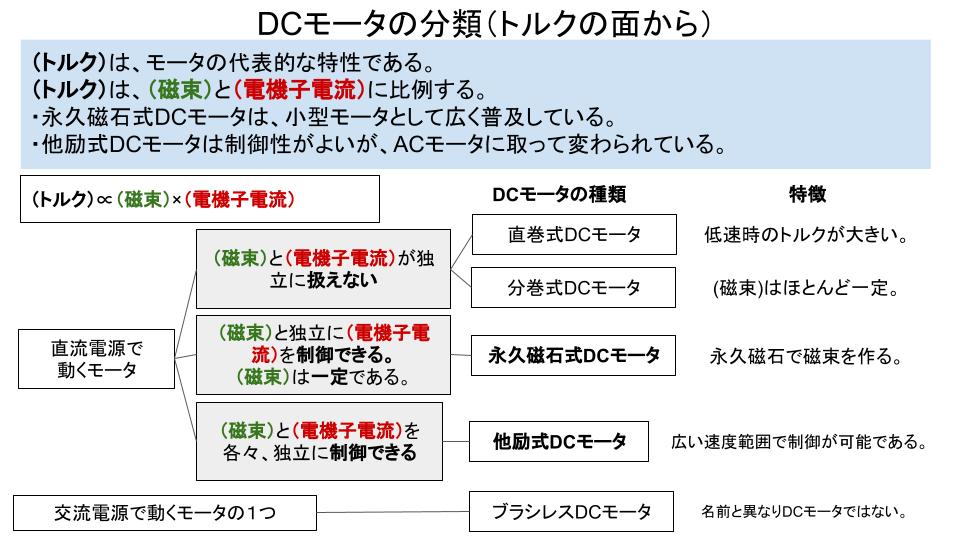
よく用いられるのは、永久磁石式DCモータです。永久磁石式DCモータでは、モータの磁束を永久磁石で発生させます。このためモータの磁束の大きさを制御することはできません。
以下では、永久磁石式DCモータと他励式DCモータに関してまとめます。直巻き、文真紀については以下のサイトが参照下さい。

また以下の動画は、永久磁石式DCモータの原理をイメージするのに便利です。
DCモータ(定電圧)のトルクカーブ
定電圧を印加した場合の永久磁石式DCモータは以下の図のように右下がりの直線となります。他励式DCモータの場合も同様の図となります。
一定の電圧を印加する場合DCモータは、このトルクカーブ(直線)上でのみ運転が可能です。例えば、電池やバッテリーで駆動する場合が、一定電圧で駆動する場合に相当します。
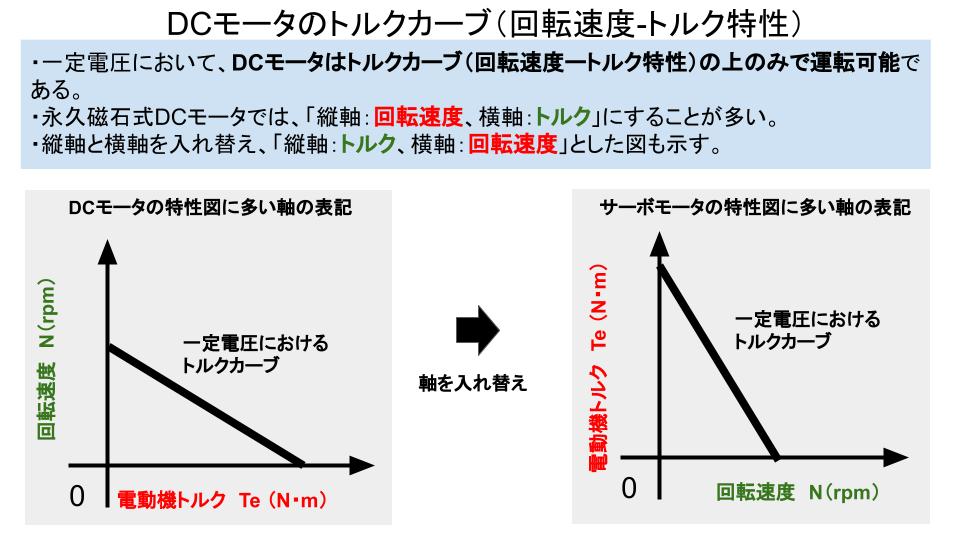
DCモータに印加する電圧を変化させる場合(サーボモータとして用いる場合)は、トルクカーブの縦軸と横軸を入れ替えて表記することが多いです。このため、縦軸と横軸を入れ替えた場合のトルクカーブも併せて示しています。
例えば、以下のタミヤのモータ仕様の特性グラフの中にも、トルクカーブ(直線)が含まれています。この図ではDCモータでよくあるように、横軸がトルク(N・m)で縦軸が回転速度(rpm)で表記されています。

DCモータの等価回路モデル
DCモータは等価回路モデルで表されます。等価回路モデルは、物理現象を少ないパラメータで表現するための手法です。このため、捨象されている現象もあります。しかしながら、基本的に多くの人が等価回路モデル的な解釈を元に、モータに関する現象を理解しているため理解は必須です。
永久磁石式DCモータの等価回路モデル
結論だけを示すと、永久磁石等価回路モデルは以下の図のようになります。
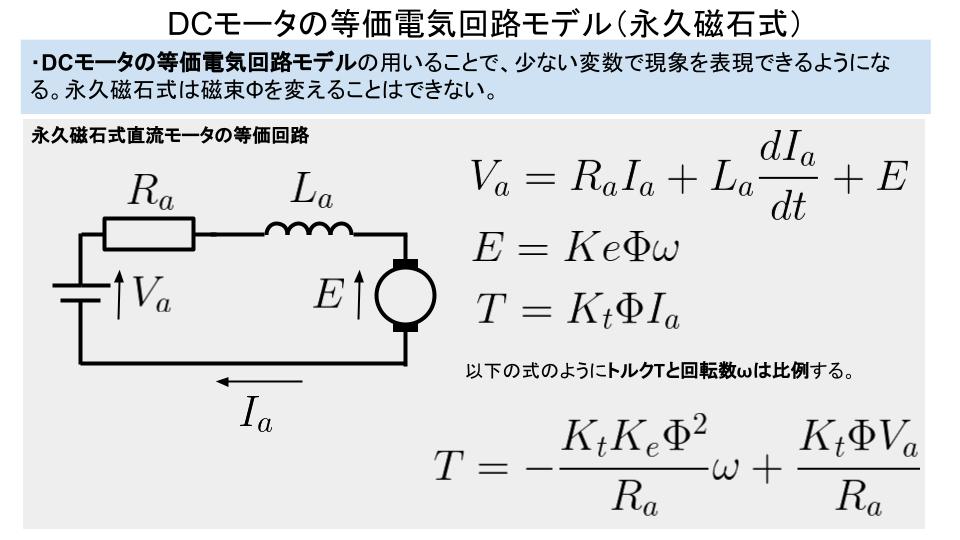
結論となる式からまとめると、トルクの回転数の関係は以下となります。数式を見るとわかるように、トルクは回転数に比例し、比例係数はマイナスであるという式となっています。つまりこの数式は、回転速度が高くなるとトルクは右肩下がりで小さくなるということを表しています*2。
\(T=-\frac{K_t Ke \Phi^2}{R_a} \omega+\frac{K_t \Phi V_a}{R_a}\)
上記の式を含めて以下で用いる文字は以下を表します。
\(K_t\):トルク定数 (N・m/A・Wb)
\(K_e\):誘起電圧定数(発電定数) (V・s/rad・Wb)
添え字のa:電機子(amature)
添え字のf:界磁(field)
\(\Phi\):磁束(Wb)
\(R_a\):電機子巻線抵抗(Ω)
\(V_a\):電機子に印加する電圧(V)
\(\omega\):角速度(rad/s)
N:回転速度(rpm、min^-1)
\(L_a\):電機子インダクタンス(H)
\(E\):逆起電力(誘起電圧)
\(T\):電動機トルク(N・m)
\(I_a\):電機子電流(A)
\(I_f\):界磁電流(A)
モデル化の詳細については、例えば以下の本のように電機機器の教科書に記載があります。

なお上記のトルクと回転数の関係式は、以下の3つの式を変形することによって得ることができます。
・電圧方程式
\(V_a=R_a I_a + L_a \frac{dI_a}{dt}+E\)
・誘導電圧の式
\(E=K_e \Phi \omega\)
・トルクの式
\(T=K_t \Phi I_a\)
これらの式をまとめると、上述のトルクと回転数の関係式を得ることができます。なお、定常状態なので\(\frac{d}{dt}\)の項は消えます。
他励式DCモータの等価回路モデル
結論だけを示すと、他励式DCモータの等価回路モデルは以下の図のようになります。
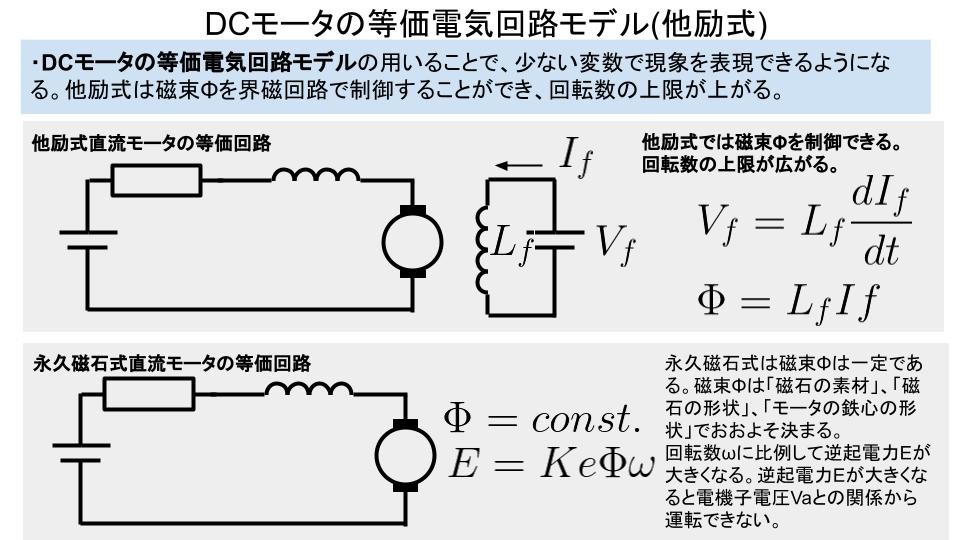
永久磁石式と異なり磁束を発生させるために電磁石を用います。このため、電磁石の回路(励磁)が追加となります。
また電磁石の電流(励磁電流)を調整することで、磁束の強さを調整できます。磁束の強さを調整すること(弱め界磁運転)によって、他励式DCモータは高い回転数でも運転を行うことができます。なお、永久磁石は磁束の強さは調整できません。
・磁束と励磁電流の関係式
\(\Phi=L_f I_f\)
\(\Phi\):磁束(Wb)、\(I_f\):界磁電流(A)、\(L_f\):界磁インダクタンス(H)
電源制御を行う場合の運転可能領域
DCモータの電源の制御を行う場合は、運転可能な範囲が広がります。このように、広い運転範囲を持つモータをサーボモータといいます。
現在はサーボモータでもACサーボモータとDCサーボモータがあり、ACサーボモータが主流です。しかし、かつてはサーボモータといえばDCサーボモータでした。
このため、現在のACサーボモータの運転可能範囲も、ある程度DCサーボモータを前提として記載されています。このため、DCサーボモータの運転範囲を理解することは、ACサーボモータの運転可能範囲を確認する際の前提知識として非常に役立ちます。
電機子電圧制御
電機子に印加する電圧を制御する方式です。永久磁石式DCモータ及び他励式DCモータともに行うことができます。
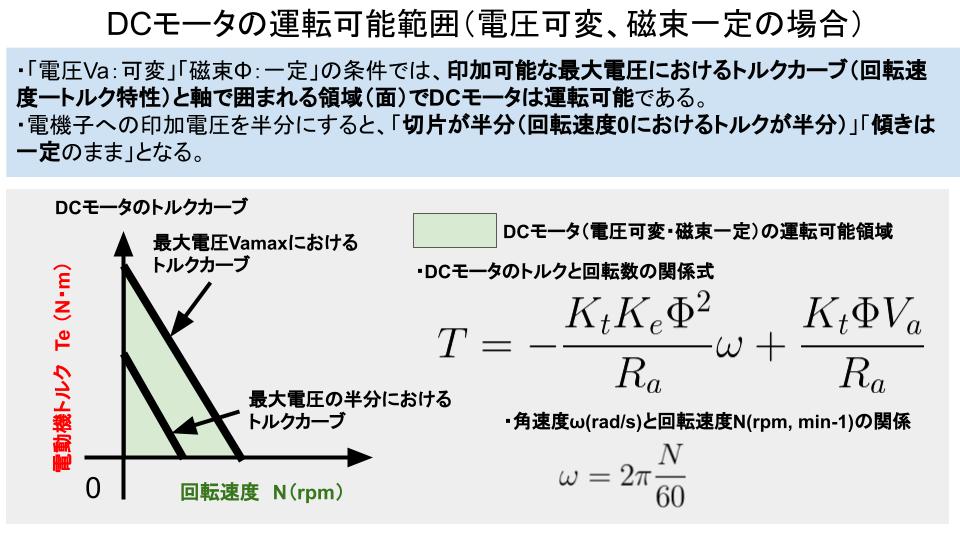
電機子電圧制御の場合の運転可能範囲は、下の図で緑色で示した領域となります。
例えば、電機子への印加電圧を半分にすると、「切片が半分(回転速度0におけるトルクが半分)」「傾きは一定のまま」となります。
電機子電圧の制御は、「直流電源の場合は直流チョッパ」、「交流電源の場合はサイリスタレオナード」などで行います。
電機子電圧制御(耐熱温度による制約)
DCモータは電源電圧の制限以外にも、部品の耐熱温度による制約も存在します。
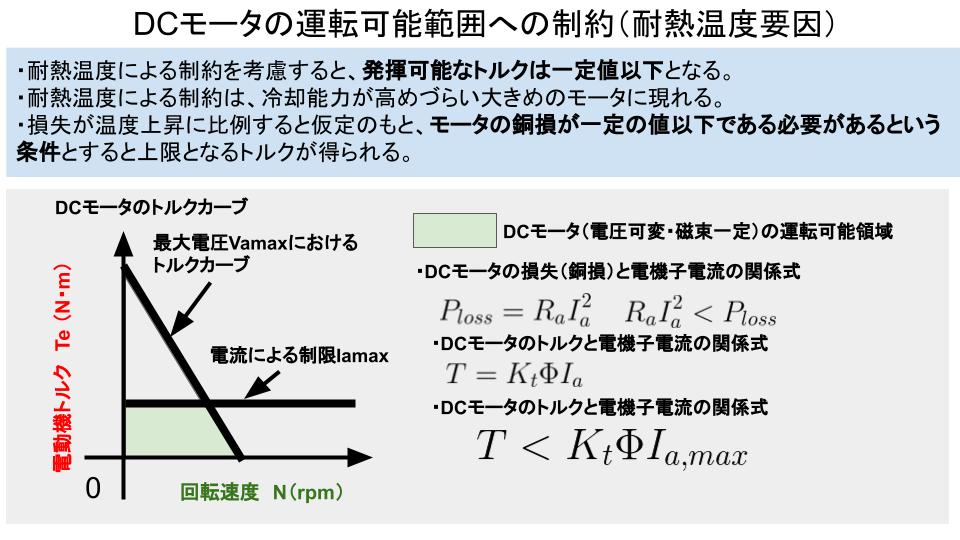
耐熱温度による制約を考慮すると、発揮可能なトルクは一定値以下となります。
耐熱温度による制約は、冷却能力が高めづらい大きめのモータに現れます。
損失が温度上昇に比例すると仮定のもと、モータの銅損が一定の値以下である必要があるという条件とすると上限となるトルクが得られます。
このため、運転可能範囲には一定トルクの上限が生まれます。これを定トルク領域と呼びます。
以下の図に、定トルク領域が生じる過程を示します。
弱め界磁制御
他励式DCモータでは、磁束の大きさを制御することができます。永久磁石式は、磁束の制御を行うことはできません。
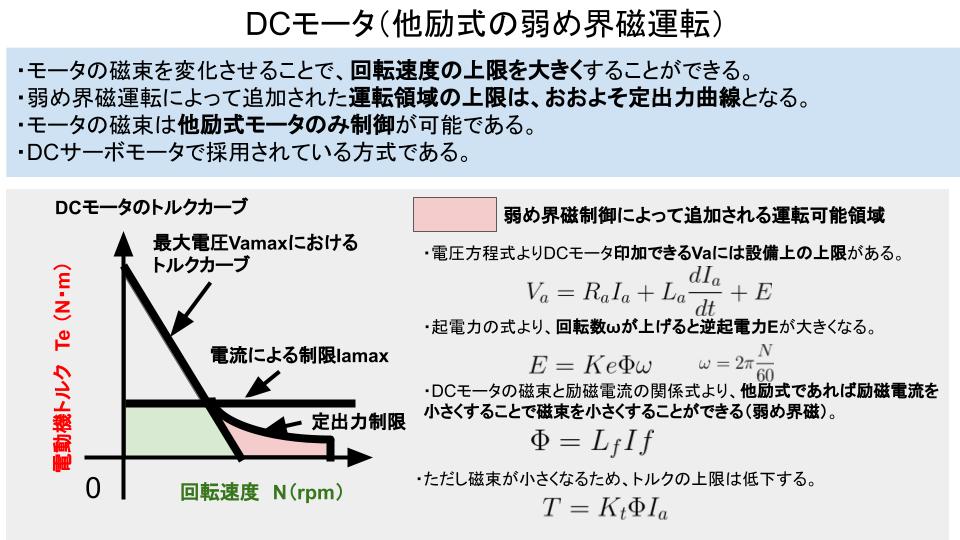
磁束を小さくすることで、より高い回転数でも運転することができるようになります。これによって拡大された運転可能範囲を以下の図では薄いピンク色で示しています。
電磁石を弱めて、磁束を小さくすることで、逆起電力Eを小さくします。これによって、高い回転数まで最大電圧Va以下で運転できるようになります。
DCサーボモータの定格の見方(DC電動機の定格の見方)
DCモータの定格は、「400/900 5kW」のように、三つの数字で表すことができます。この数字の並びが何を意味するのかを以下で紹介します。
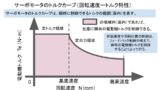
DCサーボモータの運転可能領域のまとめ
ここまでで、DCモータをサーボモータとして用いる場合の制御方式を2つ(「電源電圧制御」と「弱め界磁制御」)まとめました。
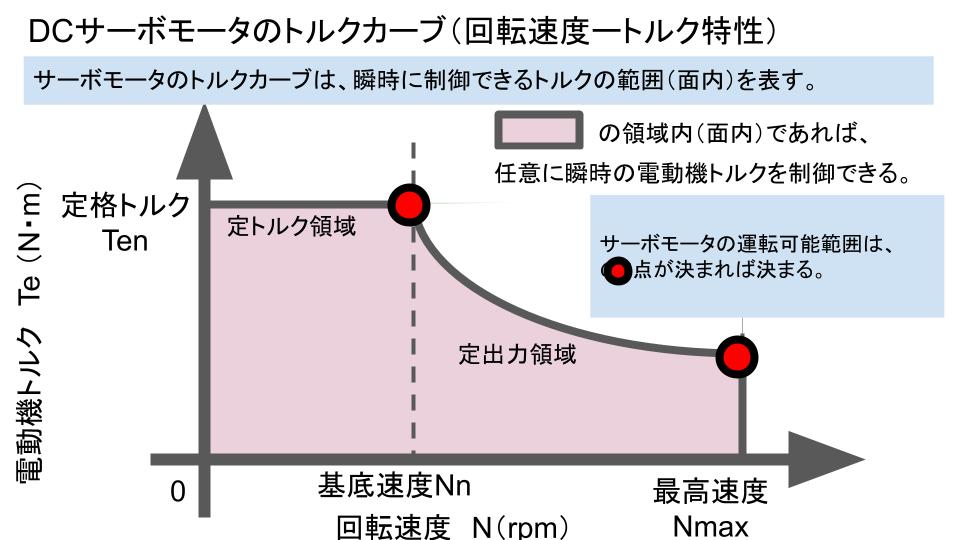
まとめるとDCサーボモータの運転可能範囲は、下の薄いピンクの領域となります。この領域であれば、電源を制御することでDCモータのトルクや回転速度を制御することができます。なお永久磁石式の場合は「定トルク領域」のみとなります。
下の図で示すように、サーボモータの運転可能範囲を「定トルク領域」と「定出力領域」に分けて考えることができます。そして赤丸で示した2点が決まれば、DCサーボモータの運転可能範囲を決めることができます。
冒頭で示した「400/900 5kW」という定格の場合、「基底速度400rpm、最高速度900rpm、定格出力5kW(基底速度における出力5kWまたは、定出力領域の上限が5kWでも同じ意味です。)」ということを表しています。以下のトルクと出力の関係式を用いることで、DCサーボモータの運転可能領域の情報を定格の3つの値のみから完全に得ることができます。
・トルクと出力の関係式
\(T=\frac{P}{\omega}=\frac{60P}{2\pi N}\)
T:トルク(Nm)、P:出力(W)、\(\omega\):角速度(rad/s)、N:回転速度(rad/min)
「400/900 5kW」の場合に、定格トルクを具体的に計算すると37.5 (Nm)となります。
・定格トルクの計算式
\(T=\frac{P}{\omega}=\frac{60P}{2\pi N}=\frac{60*5000}{2\pi*400}=37.5\) (Nm)
サーボモータの互換性
かつては、サーボモータといえばDCサーボモータでした。現在ではDCサーボモータ以外にもACサーボモータも存在します。しかしながら、DCモータがサーボモータとして用いられていた歴史などから、運転可能領域をおおよそ「定トルク領域」と「定出力領域」に分けて考えるという点は共通しています。
また運転可能範囲や「慣性モーメント」及び「剛性」などの機械的なパラメータに問題がなければ、サーボモータ間での互換性があります*3。
ACサーボモータについては、簡単に以下にまとめています。こちらを参照してもらえたらと思います。
まとめ
DCモータのトルクカーブ(N-T特性図、T-N特性図、トルク特性図)に関して紹介しました。
一定電圧では、永久磁石式DCモータ及び他励式DCモータ共に、トルクカーブ上でのみ運転可能です。
また永久磁石式DCモータ及び他励式DCモータ共に、「電機子への印加電圧を制御(電圧制御)」することでトルクカーブを制御することができます。これによって、結果的にサーボモータとして機能し、DCサーボモータと呼ばれます。
他励式DCモータは、さらに「磁束を小さくする制御(弱め磁束制御)」を行うことで最高速度を高くすることができます。
最後に、「定トルク領域」と「定出力領域」を前提としたDCサーボモータの定格の見方を紹介しました。
この記事がDCモータの理解の参考となれば幸いです。
Appendix
■参考となる文献
電動機のモデル化は、電機機器学の範囲内です。直流機は古典的な理論の範囲内であるため通常の電気機器学の教科書には記載があります。
具体的には以下の図書を参照しています。


