サーボモータのトルクカーブ(回転速度-トルク特性、トルク速度特性曲線)の見方を紹介します。
モータのトルクカーブとは?
トルクカーブとは、モータの発揮できるトルクと回転速度の関係を平面上にまとめた図です。
モータのトルクカーブは縦軸がトルク(N・m)で横軸が回転速度(rpm)であることは共通です。
サーボモータのトルクカーブは以下の二点の特徴を持ちます。
・トルクカーブの内側であれば自由にトルクを制御できる。
・トルクカーブは定トルク領域と定出力領域に分けることができる。
サーボモータ型トルクカーブ
サーボモータは、自由にモータのトルク制御が行えるモータです。自由にモータのトルクを制御できることを利用して、モータの回転速度や回転角度を制御することもできます。
サーボモータとしては、直流モータ(電圧・界磁電流制御)や同期モータ(ベクトル制御)、誘導モータ(ベクトル制御)が用いられます。これらのモータであればトルクカーブの見方は共通です。
そこでサーボモータのトルクカーブの見方を、サーボモータ型トルクカーブとしてまとめて紹介します。
サーボモータ型トルクカーブの見方
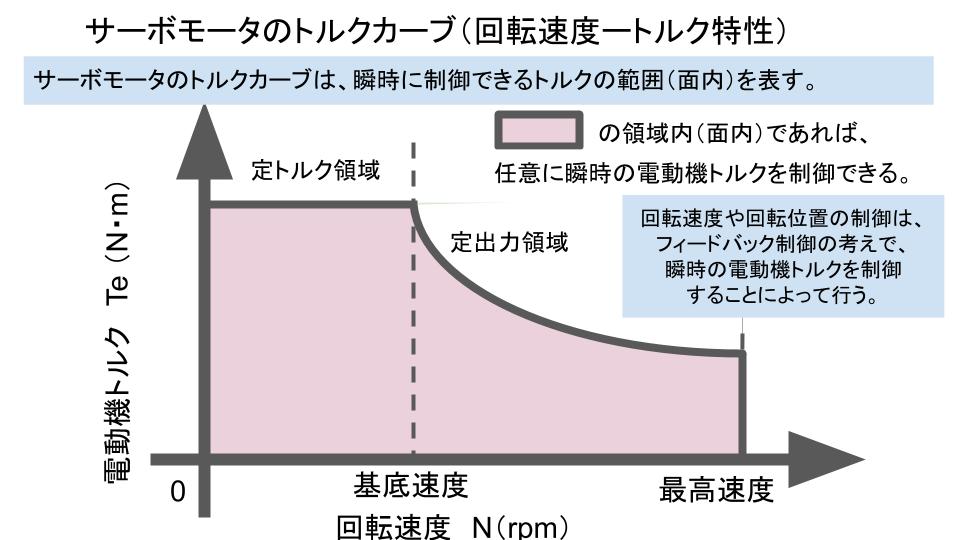
サーボモータは、基本的に回転速度にかかわらず自由にトルクを制御できます。しかし、部品の耐熱温度や電源電圧の上限によって、発揮できる領域に制限を受けます。
このためサーボモータのトルクカーブは、発揮できるトルクの限界を示したものとなります。
トルクカーブの内側(下の図で薄いピンク色の領域)であれば、自由にモータのトルクを制御が可能です。
サーボモータ型トルクカーブで知っていると差がつく点
■定トルク領域と定出力領域
サーボモータ型のトルクカーブは、上図のように定トルク範囲と定出力範囲に分けることができます*1。
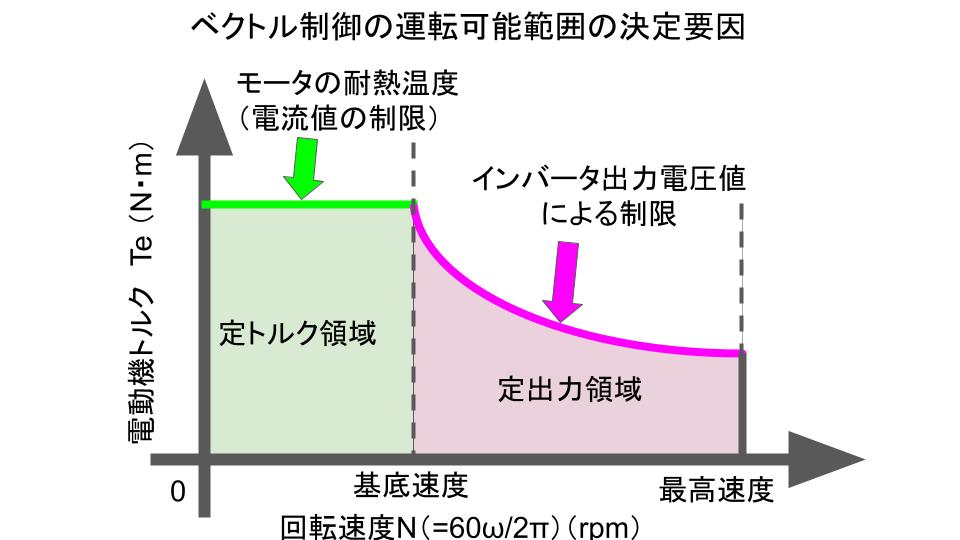
■定トルク領域と定出力領域を決める要因
同期モータや誘導モータのベクトル制御の場合、定トルク領域で出せるトルクの上限は部品の耐熱温度で決まります。また、定出力領域で出せるトルクの上限はインバータの出力電圧の上限で決まります*2。
部品の耐熱温度で決まる定トルク領域は、短時間であれば大きなモータトルクを発揮することができます*3。
■永久磁石式直流モータの注意点
永久磁石式直流モータの場合は、定出力範囲がありません*4。
■表面磁石式同期モータ(SPMモータ)の注意点
また、表面磁石式同期モータの場合は、定出力領域で対応できる回転速度の幅が狭くなります*5。
市販モータの分類の具体例
具体例として、三菱FA製品で、サーボモータ型に分類されるモノをいかにまとめます。他の企業の製品も同様です。
これらのモータのトルクカーブを見ることで、実際にサーボモータ型のトルクカーブで紹介されていることが把握できると思います。
汎用サーボモータ(表面磁石同期モータ)
永久磁石同期モータ(ベクトル制御)であるため、製品名の通りサーボモータです。このため、サーボモータ型のトルクカーブの見方となります。
汎用誘導モータ(ベクトル制御)
汎用誘導モータ(ベクトル制御)も、広義のサーボモータです。このため、サーボモータ型のトルクカーブの見方を行います。
三菱インバータの制御モードとしては、ベクトル制御やリアルセンサレスベクトル制御が、サーボモータ型のトルクカーブの見方となります。
アドバンスト磁束ベクトル制御を含めて、○○磁束ベクトル制御という制御モードは、基本的にV/f制御です*6。このため、サーボモータ型ではなくトルクカーブの見方が若干異なります。注意が必要です。
トルクカーブの分類
この記事では、サーボモータのトルクカーブの見方を紹介しました。
モータのトルクカーブは、モータの分類によって見方が異なります。
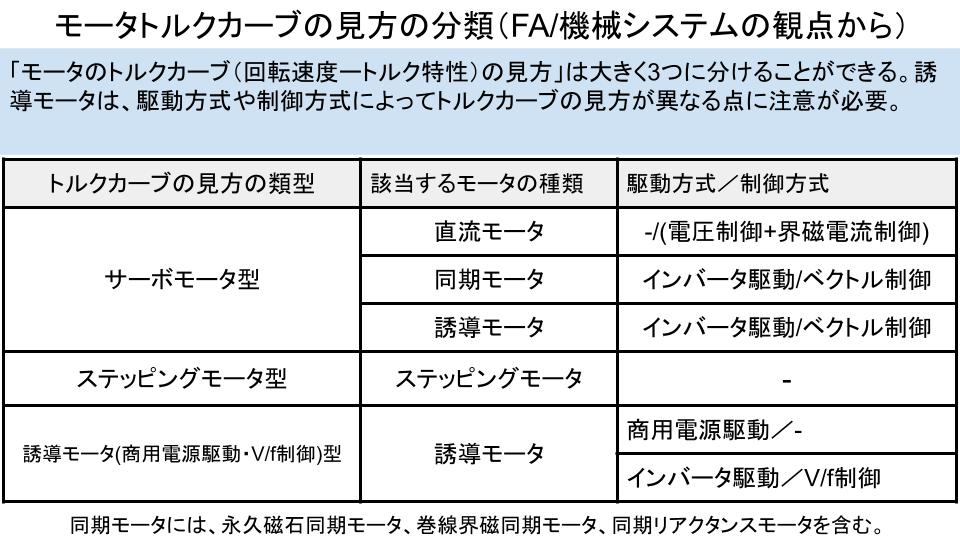
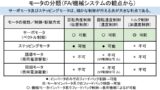
モータのトルクカーブは、以下の図のように大きく3つに分けられます*7。
モータトルクカーブの見方の分類(FA/機械システムの観点から)
サーボモータ型は、サーボモータの場合のトルクカーブの見方です。サーボモータとは、直流モータ(電圧・界磁電流制御)や同期モータ(ベクトル制御)、誘導モータ(ベクトル制御)のことです。
ステッピングモータ型は、ステッピングモータの場合のトルクカーブの見方です。
誘導モータ(商用電源駆動・V/f制御)型は、誘導モータ(商用電源駆動)や誘導モータ(V/f制御)の場合のトルクカーブの見方です。
各モータのトルクカーブの違いは以下にまとめているので、こちらを参照いただけたら幸いです。

各モータの違いについては以下の記事で紹介しているので、こちらで参照いただけたら幸いです。
また、誘導モータ(V/f制御)と誘導モータ(ベクトル制御)の違いなど、誘導モータの駆動方式や制御方式の違いは以下の記事で紹介しています。
まとめ
この記事では、サーボモータのトルクカーブの見方を紹介しました。
サーボモータは、トルクカーブの範囲内で自由にトルクが制御できることが特長です。また、このトルクカーブは定トルク領域と定出力領域に分けることが可能です。
サーボモータは、このように上記の範囲内で自由にトルクを制御できます。このことから、逆説的にどのような制御を行うかを決めることが重要です。


*1:他励式直流モータの制御に由来します。他励式直流モータで、電圧制御のみで速度制御に対応できる範囲を定トルク範囲といいます。またそれ以上の回転速度で、界磁電流の制御も行って速度制御を行う範囲を定出力範囲といいます。
*2:直流モータとのアナロジーという便宜上、定トルク領域や定出力という表現が行われています。このため、実際に対応可能な範囲は、これより広いです。
*3:熱時定数が長いため、短時間であれば許容できます。実際は定出力領域にも余裕があるため、汎用サーボでは短時間定格が設定されている。
*4:界磁電流制御が行えないため。
*5:回転子のリアクタンスに異方性がないため。
*6:三菱INVニュースを眺めた直感です。実際の制御方法は不明です。
*7:トルクカーブの分類は、私が勝手に分類していますが、おおよそこの3つが理解できていれば、問題ありません。