ステッピングモータ(スイッチトリラクタンスモータ、SRモータ)のトルクカーブ(回転速度-トルク特性、トルク速度特性曲線)の見方を紹介します。
モータのトルクカーブとは?
トルクカーブとは、モータの発揮できるトルクと回転速度の関係を平面上にまとめた特性図です。
モータのトルクカーブは縦軸がトルク(N・m)で横軸が回転速度(rpm)であることは共通です。
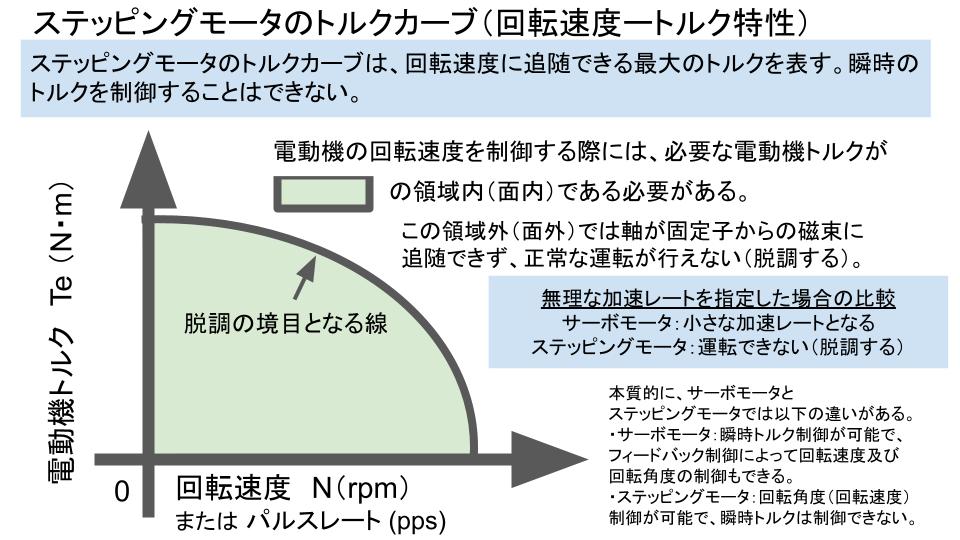
ステッピングモータのトルクカーブの特長は以下の二点です。
選定段階で、必要なトルクがトルクカーブの内側となることを確認する必要がある。
トルクカーブの外側のトルクが必要となると正常な運転ができない(脱調する)。
ステッピングモータ型トルクカーブ
ステッピングモータは、回転角度を指定することができるモータです。一定時間ごとに角度を変化させることで回転速度を制御することもできます。
以下の動画が原理はイメージしやすいです。
ステッピングモータ型トルクカーブの見方
ステッピングモータでは、サーボモータと異なり、意図してトルクを制御することは不可能です。
このため、指定した回転速度の際に必要なモータトルクが、結果的に図の薄い緑の範囲内に収まっている必要があります。
薄い緑色の範囲の外では、パルスによって生じる固定子からの磁束にモータの軸が追随できなくなります。この現象を脱調といいます。
サーボモータと比較した際に、ステッピングモータのトルクカーブを見るときに注意するべきなのはこの点です。
ステッピングモータのトルク検討例
ステッピングモータでは、脱調を防ぐために事前の検討が必要です*1。
以下の図では、簡単な場合の検討例を示しています*2。
下の図では、回転速度を制御することを目的としています。
回転速度を時間と比例して大きくしていくために、時間t1までは一定のモータトルクが必要となります。
一定の回転速度に至ってからは、モータトルクは不要となります*3 。
「運転パターン」及び「駆動される機械の特性(剛性、減衰、慣性モーメント)」から必要なトルクを計算します。
最大回転数のときのトルクが、トルクカーブの中に入っていればOKです。
最大回転数のときのトルクが、トルクカーブの中に入っていなければ、「ステッピングモータの再選定」や「運転パターンの変更」を行います。
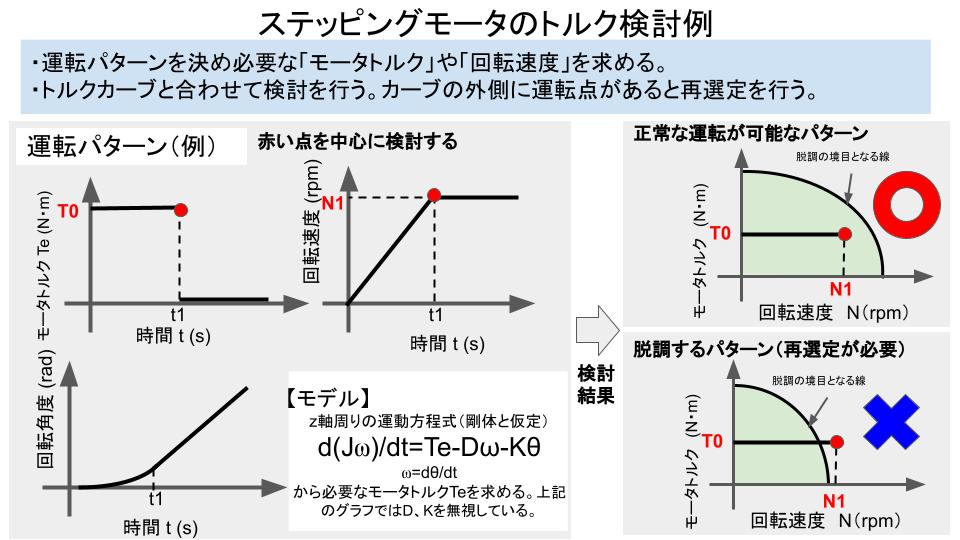
上の図で、赤丸で示した機種の場合は、望みの運転パータンで運転可能です。青バツで示した機種の場合は、望みの運転パターンでの運転は不可となります。
その他の事項を含めた、事前の検討方法については以下に示す、オリエンタルモーターのサイトにて紹介されています。

市販モータの具体例
具体例として、オリエンタルモーター及びキーエンスのステッピングモータのサイトを以下に示します。他の企業の製品も、トルクカーブ(回転速度ートルク特性)の見方は同様です。


トルクカーブの分類
モータのトルクカーブは、モータの分類によって見方が異なります。
モータのトルクカーブは、以下の図のように大きく3つに分けられます*4。
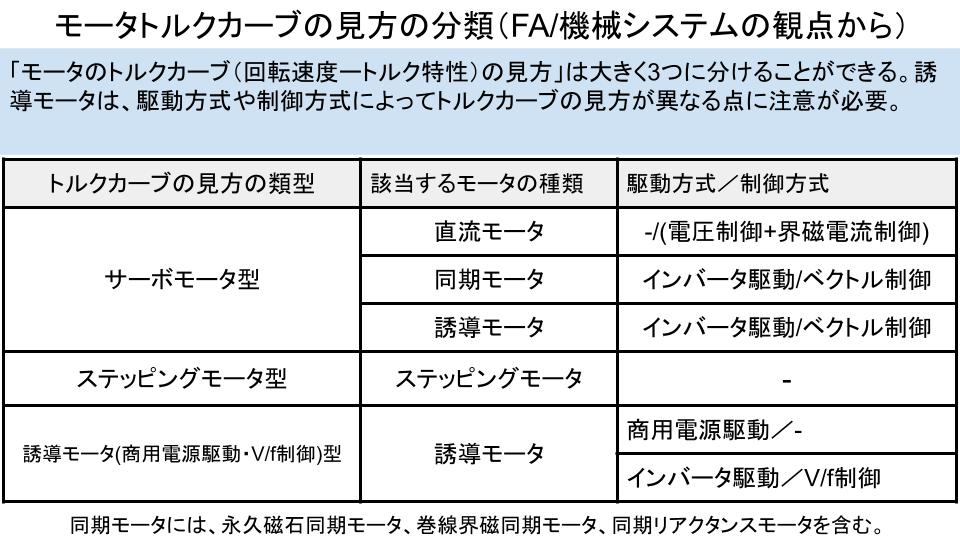
サーボモータ型は、サーボモータの場合のトルクカーブの見方です。サーボモータとは、直流モータ(電圧・界磁電流制御)や同期モータ(ベクトル制御)、誘導モータ(ベクトル制御)のことです。
ステッピングモータ型は、ステッピングモータの場合のトルクカーブの見方です。
誘導モータ(商用電源駆動・V/f制御)型は、誘導モータ(商用電源駆動)や誘導モータ(V/f制御)の場合のトルクカーブの見方です。
各モータトルクカーブの見方の違いについては以下の記事で紹介しているので、こちらで参照いただけたら幸いです。

まとめ
この記事では、ステッピングモータのトルクカーブの見方を紹介しました。
ステッピングモータでは、サーボモータと異なり、意図してトルクを制御することは不可能です。
このため、指定した回転速度の際に必要なモータトルクが、結果的に図の薄い緑の範囲内に収まっている必要があります。
関連記事
誘導モータ(V/f制御)と誘導モータ(ベクトル制御)の違いなど、誘導モータの駆動方式や制御方式の違いは以下の記事で紹介しています。
サーボモータ型のトルクカーブの見方は、ステッピングモータ型と異なります。サーボモータ型のトルクカーブの見方については以下の記事で紹介しています。