Simulinkを用いたDCモータシミュレーションを、トランジスタ技術2022年2月号のとおりに行いました。
モータモデルやフィードバック制御は把握していても、どのようにシミュレーションを行うか疑問に思っている方は私以外にも多いと思います。「トランジスタ技術2022年2月号 モータ物理シミュレーション」が非常に参考になったため紹介します。
DCモータシミュレーションとは
DCモータは、DC(直流)電源で動くモータです。電源の電圧や電流を制御することで、モータトルクやモータ回転数を制御することができます。
DCモータシミュレーションでは、DCモータのトルクや回転数がどのように変化するかをシミュレーションします。
機械システムの視点から、モータの分類を行うと以下のようになります。DCモータは、トルクを制御することができるサーボモータの一つです。またモータモデルも簡単であり、制御が比較的容易という特徴があります。
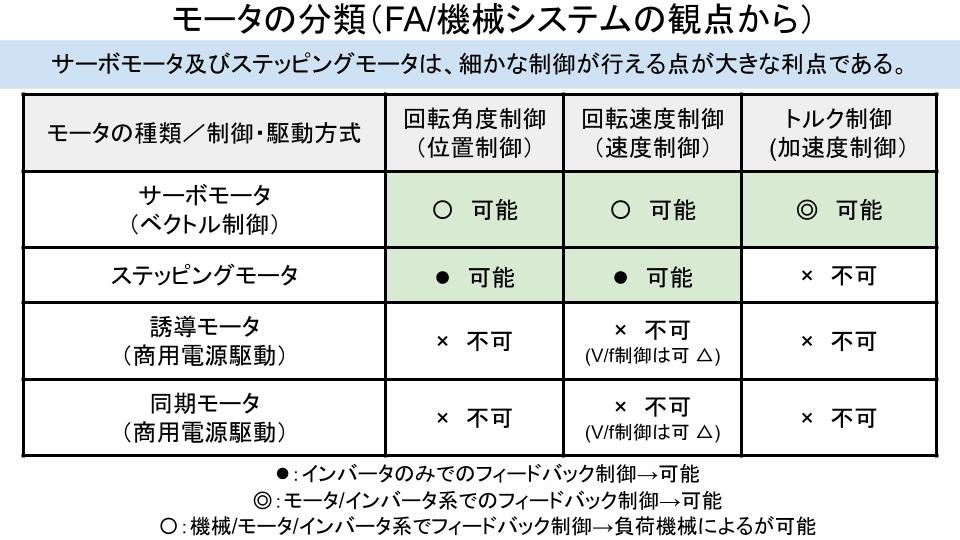
DCモータは、モータモデルが簡単であるため、シミュレーションが比較的容易です。このため、多くあるサーボモータ型のモータの中でも、直流モータのシミュレーションが行われることが多いです。
DCモータシミュレーションの方法
具体的なDCモータのシミュレーション方法は、「ドランジスタ技術 2022年2月号」を元に行いました。このため、実際にシミュレーションを行いたい方は、こちらの書籍の参照をお願います。


また、シミュレーションを行うにはMATLAB及びSimulinkという有償ソフトが必要です。個人の趣味利用であれば、MATLABは18,000円、Simulinkは5,000円程度で購入することができます。各々の容量は1.5GB程度で、1つのライセンスで2つの端末までインストールが可能でした。

MALTABに似た無償ソフトとしてScilabというものがあります。こちらのソフトでも頑張れば、シミュレーションの実行は可能と思います。細かいグラフの表示方法などがMATLAB/Simulinkと異なるなどの違いがあるため、MATLABを購入してシミュレーションで遊んでみるのが良い気がします。

シミュレーション結果
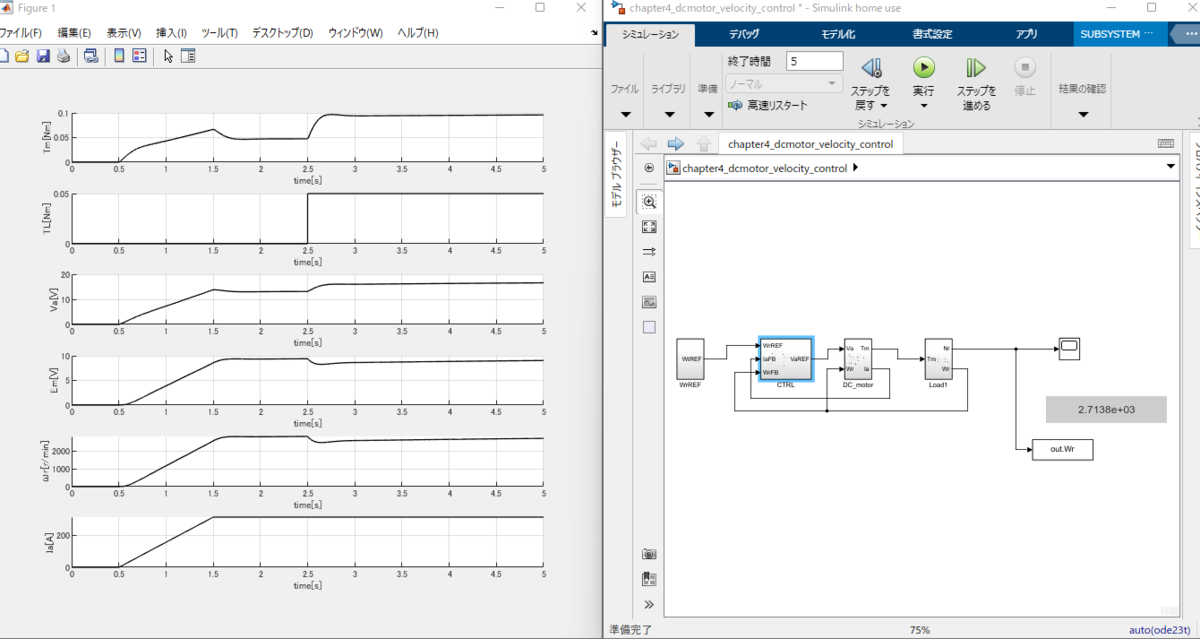
実際にトランジスタ技術に従って行ったシミュレーション結果の一例を示します。
速度を指定するシミュレーションの結果です。速度指令値から、トルク指令値を得ます。トルク指令値から電流指令値を得るという流れです。
そのほかのシミュレーションや詳細については、「トランジスタ技術2022年2月号 モータ物理シミュレーション」の参照をお願いします。
シミュレーションの内容
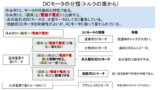
「トランジスタ技術 2022年2月号」では、シミュレーションは大きく以下の3つの部分に分けられています。他の号でインバータ波形も考慮した部分が追加されるようです。
・機械のモデル化⇒振動工学の範疇
・モータのモデル化⇒電気機器理論の範疇
・トルク目標値への制御⇒古典制御の範疇
モデル化をすることによって、複雑な物理現象も容易にシミュレーションを行うことができます。
機械のモデル化では、「ばねー質量ーダンパ」系を基本として考えます。
モータのモデル化では、等価回路の考え方を元に「抵抗、インダクタンス、発電定数、トルク定数」の変数に落とし込みます。
トルク目標値への制御は、典型的なフィードバック制御を行うことによって行います。
機械のモデル化
機械のモデル化は、振動工学の知識を用いて行います。
「トランジスタ技術2022年2月号」では、もっとも簡単な位置自由度の機械モデルとしているようです。
機械モデルの作成は、古典力学や振動工学の知識があれば行えると思います。古典力学の内容も含んだ、典型的な振動工学の教科書を以下に示します。振動モードに分解する方法なども、以下の教科書では学べます。

モータのモデル化
モータのモデル化は、電機器理論の知識を用います。
モータの等価回路定数やモータトルクの計算までを行います。これによって、電流などの電気的な値を、トルクといった機械的な値へと結びつけることができます。
モータモデルの作成には以下のような電機器理論の教科書を参照できれば行えるのではないかと思います。制御を行うことを前提とした電気機器(電気機器のモデル化法を紹介する)教科書は案外少ない印象です。

トルク目標値への制御
トルク目標値への制御は、典型的なフィードバック制御で行います。
フィードバック制御を行うと、おおよその制御対象は目標値に到達します。かなり汎用的な制御方式です。
フィードバック制御の理解のためには、以下のような古典制御の教科書が参考となります。

また、実際に具体的にACモータの場合の制御についてまとめてある本としては以下のようなものがあります。

DCモータのモデルの概要
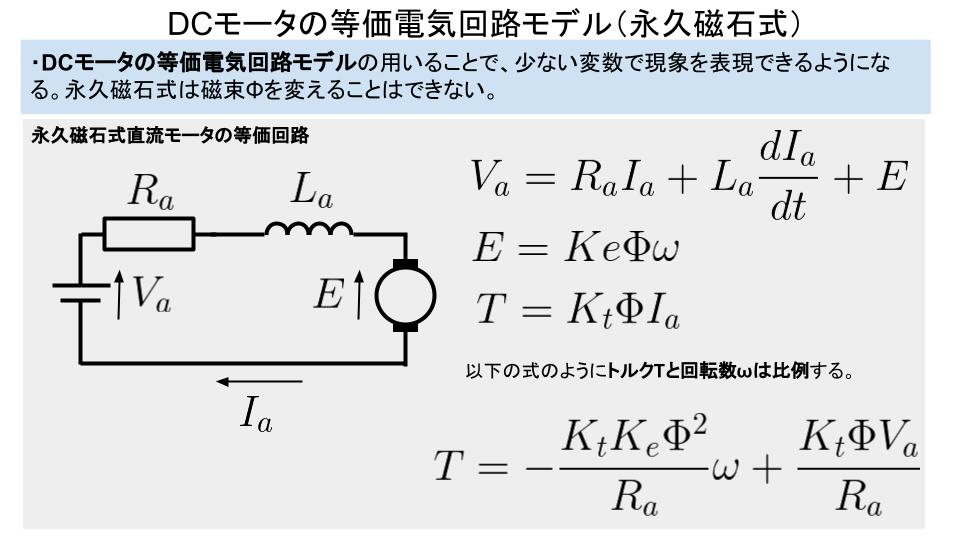
DCモータのモデルの概要については、簡単に以下のページにも記載ありますが、基本的に電気機器理論の教科書を参照願います。。トランジスタ技術で紹介されているのは、永久磁石式DCモータです。
以下に、上記の記事の抜粋を示します。永久磁石式DCモータの物理モデルは以下のようなものとなります。詳細な導出などは、電気機器理論の教科書の参照をお願いします。
個人的に作業に詰まった点について
共有のために、個人的に作業に詰まった点をまとめておきます。
・p.105 図3 トルク指令値だが、図7の図では電流指令値となっている。
・DCモータのパラメータはp.105第4章表1に記載がある。
まとめ
今回は、「トランジスタ技術2022年2月号 モータ物理シミュレーション」に従ってモータシミュレーションを行ってみました。
モータの物理モデルやフィードバック制御を、具体的にどのような手段でシミュレーションするかの理解をすることができました。
私と同様に簡単なシミュレーション方法のイメージがつかない方の参考となればと思います。