三菱FAのFreqrolシリーズに搭載されたアドバンスト磁束ベクトル制御について紹介します。
情報は、三菱FAの資料を参照しています*1。
アドバンスト磁束ベクトル制御の概要
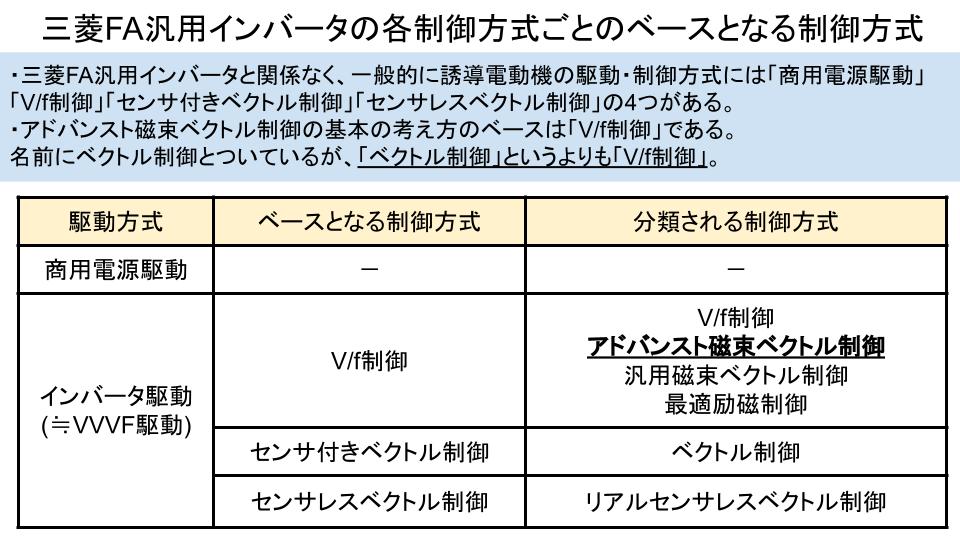
端的にまとめると、アドバンスト磁束ベクトル制御はV/f制御の改良版です。名前にはベクトル制御とついていますが、一般的な「ベクトル制御」をベースとしているというよりも、「V/f制御」をベースとしています。
基本的に三菱FA汎用インバータの「○○磁束ベクトル制御」は、「V/f制御」がベースであり、「ベクトル制御」がベースではないと考えられます。なお、三菱FA汎用インバータについて、その他の制御モードを含めて、一般的な制御方式の何をベースとしているかの対応を以下の表に示します。
V/f制御とは、誘導モータを可変速運転できる制御のことです。V/f制御を実行するためには、インバータが必要です。
アドバンスト磁束ベクトル制御で実行可能なことは、*基本的にV/f制御と同じです。しかしながら、アドバンスト磁束ベクトル制御では、V/f制御の弱点である以下の2点が解消されています。
V/f制御の弱点1. 回転数に数%以内の誤差が生じる。
V/f制御の弱点2.低回転数時に発揮できるトルクが小さくなる。
以下の動画の方は、「汎用磁束ベクトル制御」の利用方法を紹介しています。動画であるためインバータの機能のイメージが湧きやすいです。
「汎用磁束ベクトル制御」は、「アドバンス磁束ベクトル制御」に似たようなものと思って動画でイメージをもっていただけたらと思います。
このページのおわりに「汎用磁束ベクトル制御」や「アドバンスト磁束ベクトル制御」などの「V/f制御」をベースとした制御の比較についてもまとめています。
以下では、基本となるV/f制御の考え方と、解消されている2点の弱点についてまとめます。
そもそもV/f制御とは?
V/f制御とは、誘導モータの回転数をおおまかに制御できる制御方式です。
誘導モータは、回転数が電源周波数fにおおよそ比例します。電源周波数fを変化させると、誘導モータの回転数も数%以内の精度で制御できます。
■必要な指令値は「電源電圧V」と「電源周波数f」
定常時を考えると三相交流電源のパラメータは、周波数fと電圧Vのみとなります。このため、定常時の運転を考えると、電源電圧Vを決めると良いことになります。
V/f制御では、定格電圧まではV/fを一定となるように制御します。一定とする際に基準とする電圧Vと周波数fは、それぞれ定格電圧Vnと定格周波数fnです。
■V/fを一定にすると磁束Φ一定となる
V/fをおおよそ一定とするのは、磁束Φをおおよそ一定とできるからです。誘導モータが発生できる最大のトルクTmは磁束Φで決まります*2。このため、磁束を一定とすることで一定の最大トルクを確保することができるようになります。
■磁束Φと電源電圧Vの関係式
磁気回路において、磁束の波高値Φmは以下の式で表されます。この式を見るとわかるように、磁束ΦはおおよそV/fに比例します。このため、V/fを一定に制御すれば、磁束やトルクが一定に保たれるというのがV/f制御の考え方です。
\(\Phi=\frac{E}{4.44Nf}≒\frac{V}{4.44Nf}\)
ここで、各文字の意味は以下の通りです。
\(\Phi\)は磁束の波高値 (Wb)
\(V\)は電源電圧の実行値 (V)
\(E\)は励磁回路に印加される電圧の実行値 (V)
\(N\)は巻き数(回)
\(f\)は電源周波数 (Hz)
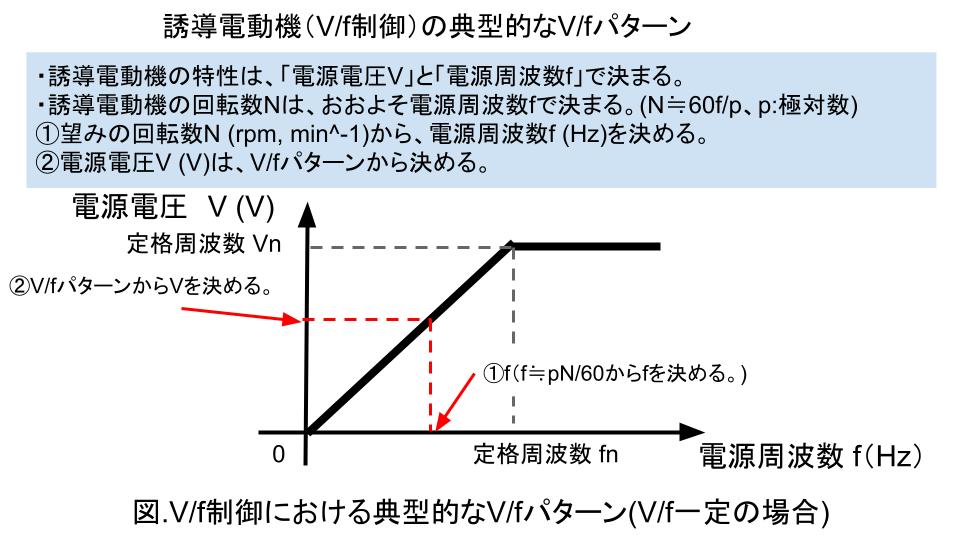
■電源のV/fパターンについて
以下の図に電源電圧Vと電源周波数fの関係を示すV/fパターンを示します。V/fパターンに従って電源を制御するのがV/f制御です。
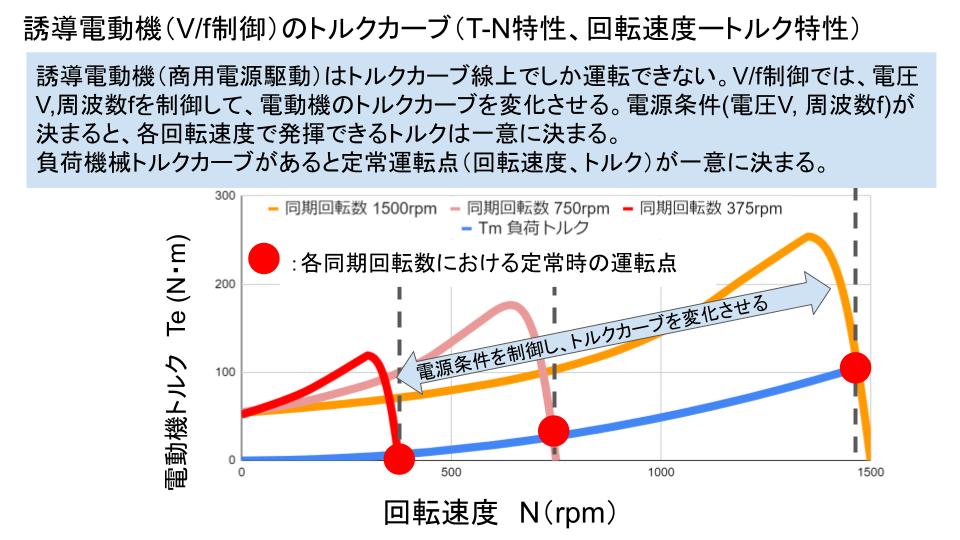
■V/f制御のトルクカーブ(T-N特性)
また、以下の図にトルクカーブ(T-N特性)を示します。後述することと関連しますが、V/fを一定としてもトルクの最大値は電源周波数が小さくなると小さくなってしまいます。
特徴1:より正確な回転数制御
アドバンスト磁束ベクトル制御では、一般的なV/f制御と異なり指定したモータ回転数での運転が可能です。
V/f制御では、モータの回転数を厳密に指定することができません。原理上、誘導モータは、数%以下ですが回転数が電源周波数から決まる回転数*3より小さくなります。
アドバンスト磁束ベクトル制御では、「電流」と「モータの回路定数」から回転数を推定しているようです。この回転数の情報を元に、モータの回転数を制御しているようです。このため、アドバンスト磁束ベクトル制御では、V/f制御と比較して回転数の精度がかなり高くなります。
回転数の推定の際には、モータの回路定数を用います。抵抗などの回路定数は温度によって変動します。アドバンスト磁束ベクトル制御では、回路定数の温度による変動を補正する機能もあります*4。
特徴2:より大きな始動時トルクの確保
アドバンスト磁束ベクトル制御では、低回転数時(始動時)でも大きなトルクを確保できます。
V/f制御は、低回転数時にトルクが小さくなります。これは、一次巻線の抵抗による電圧降下の影響が大きくなるためです。この電圧降下によって、磁束を発生させる回路に印加される電圧Eがfに比例しなくなります。このため、低周波数の時には、モータの磁束Φも小さくなります。
結果的にモータの磁束Φが小さくなるため、モータの最大トルクも磁束Φの二乗に比例して小さくなります。これがV/f制御の低回転数時のトルクの課題です*5
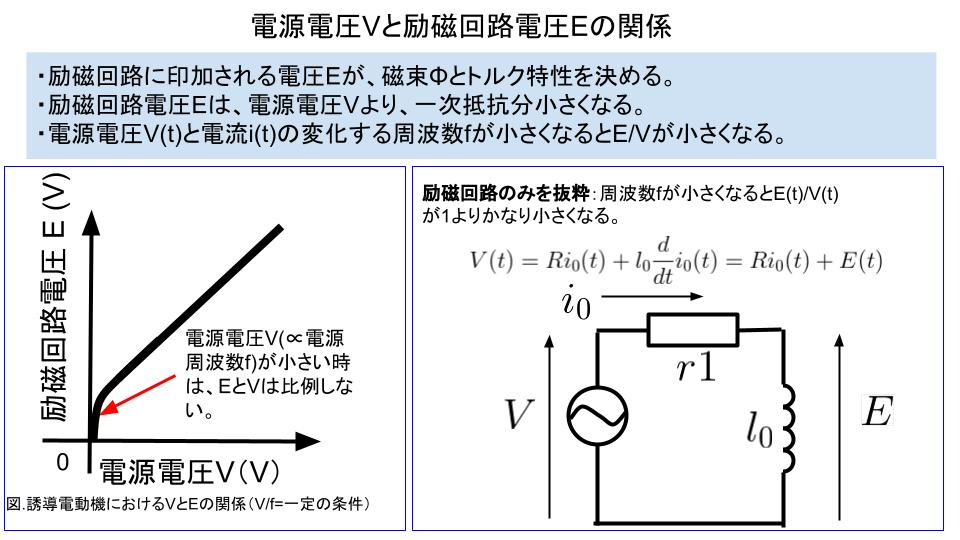
アドバンスト磁束ベクトル制御では、低回転数時でも自動で高いトルクが出るように制御しています。電流値から電圧降下を予測し、印加電圧を補正しているようです*6。
このようにしてアドバンスト磁束ベクトル制御では、V/f制御の弱点の一つである低回転数時のトルクの低下を克服しています。
アドバンスト磁束ベクトル制御が可能な製品
三菱FA汎用インバータでアドバンスト磁束ベクトル制御の利用が可能な製品シリーズは、「FR-A800シリーズ」「FR-F800シリーズ」「FR-E700シリーズ」*7です。
なお「FR-D700シリーズ」では、汎用磁束ベクトル制御が可能なようです。汎用磁束ベクトルについては、後述します。
ラインアップ 製品特長 | インバータ FREQROL | 三菱電機 FA
リアルセンサレスベクトル制御との比較
誘導電動機の制御方式ごとの特徴をまとめた図を以下に示します。
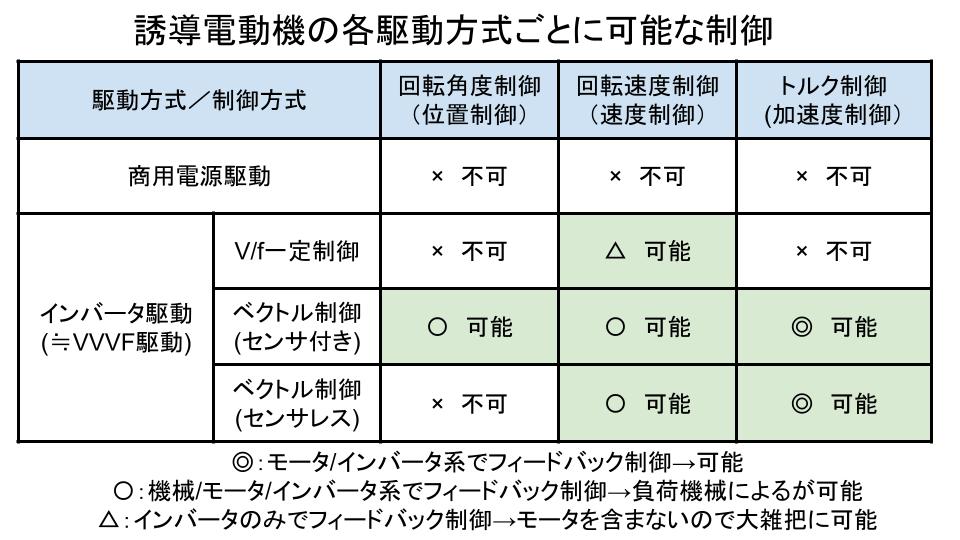
「アドバンスト磁束ベクトル制御」に関しては「V/f制御」をベースとした制御であるため、「V/f制御」の項目を確認ください。一般的なセンサレスベクトル制御は、三菱FAの呼称では「リアルセンサレスベクトル制御」となります。このため、「リアルセンサレスベクトル制御」に関しては、「センサレスベクトル制御」の項目を確認ください。
「FR-A800シリーズ」及び「FR-E700シリーズ」では、「アドバンスト磁束ベクトル制御」と「リアルセンサレスベクトル制御」の選択が可能です。この二つのどちらを採用するかは、一般的な「V/f制御」と「センサレスベクトル制御」のどちらを採用するかの比較に近いです。
つまり、以下の点を考慮して制御方式を選択すればよいのではないかと考えられます。基本的にV/f制御ベースの「アドバンスト磁束ベクトル制御」で対応し、不可能であれば、「リアルセンサレスベクトル制御」を選択するのかと思われます*8。
・アドバンスト磁束ベクトル制御の方が、技術的な検討事項が少なく有利である。
・定常運転(回転数が、10分以上同じなど)が主であれば、アドバンスト磁束ベクトル制御で対応できる。センサレスベクトル制御で対応する。
・トルク指定を行う場合は、アドバンスト磁束ベクトル制御は対応不可能である。
・比例ゲインなどを指定して回転数のPID制御(トルク制御)をおこなう場合は、アドバンスト磁束ベクトル制御は対応不可能である。センサレスベクトル制御で対応する。
・回転角度(位置)制御を行う場合は、アドバンス磁束ベクトル制御及びセンサレスベクトル制御ともに対応不可能である。センサ付きベクトル制御で対応する。
V/f制御との比較
三菱FAの制御方式において、そもそも一般的にはV/f制御に分類される制御の方式は以下の通りとなります。
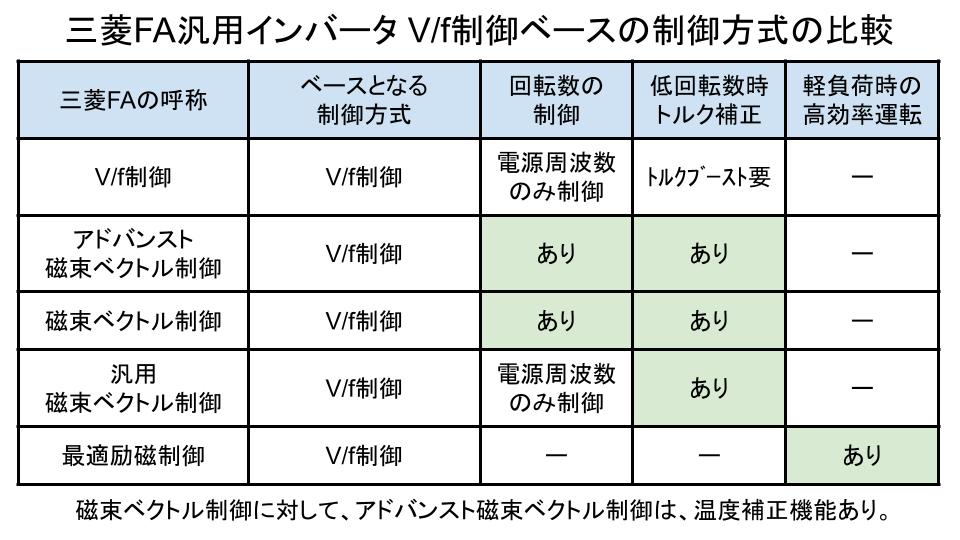
「FR-D700シリーズ」に搭載された汎用磁束ベクトル制御は、低回転数時のトルクを大きくする機能がついています。
三菱FA呼称の「V/f制御」と「アドバンスト磁束ベクトル制御」は、搭載されているシリーズが異なります。どちらを選択するかは、次の項目を考慮すればよいと考えられます。基本的に三菱FA呼称の「V/f制御」での対応し、不可能であれば「アドバンスト磁束ベクトル制御」を選択するのかと思われます*9。
・「V/f制御」であれば、廉価シリーズで対応できる可能性があり有利である。
・低回転数時のトルク低下や回転数の数%の誤差が許容できない場合は、V/f制御で対応不可能である。アドバンスト磁束ベクトル制御(または磁束ベクトル制御)で対応する。
・低回転数時に大きなトルクを必要とする場合は、基本的にV/f制御のトルクブーストで対応する。トルクブーストでは不足しそうな場合は、アドバンスト磁束ベクトル制御(または磁束ベクトル制御、汎用磁束ベクトル制御)で対応する。
・ファンやポンプなど低い回転数で運転する際に、必要なトルクが小さい場合は最適励磁制御を追加して行う*10。
まとめ
このページでは、三菱FAのアドバンスト磁束ベクトル制御についてまとめました。
簡単にまとめると、アドバンスト磁束ベクトル制御は、V/f制御の改良版です。V/f制御と比較して、以下の2点の特徴があります。
特徴1. 回転数の制御がより正確である。
特徴2. 低回転数時のトルクがより大きくなる。
アドバンスト磁束ベクトル制御は、三菱独自の用語です。このためなのか、この制御の概要を調べても、直接的にイメージを掴むための情報が得られません。具体的には、以下の資料しかありません。
三菱汎用インバータの各種制御方式
このページが私と同じようにモヤモヤしている方などの参考になれば幸いです。
参考文献
[改訂版]徹底解説 電動機・発電機の理論 (EnergyChord)
■関連ページ
FAのためのモータまとめ【サーボモータ/ステッピングモータ/誘導モータの違い】 - 技術のスプーン
誘導電動機の駆動方式まとめ V/f制御とは?ベクトル制御とは?【FA/機械システム/プラントの基本】 - 技術のスプーン
誘導電動機のトルクカーブの見方【FA/機械システム/プラント】 - 技術のスプーン
*1:三菱汎用インバータの各種制御方式を参照していますが、このページには誤りを含んでいる可能性があります。
*2:モータとトルクは二次側に鎖交する磁束Φ×二次電流I2です。誘導モータの場合は、二次電流I2も二次側回路に鎖交する磁束による誘導起電力によって生じます。このため、誘導モータのトルクの特性は磁束Φで決まることになります。
*3:同期回転数
*4:ただし、回路定数の推定は起動時のみです。このため、誘導モータを連続運転する場合には定数の補正はされません。
*5:通常のV/f制御では、低回転数時の印加電圧を大きくすることで最大トルクの低下を防止します。これをトルクブーストと言います。
*6:具体的な制御方式は不明です
*7:漏れがありましたら申し訳ありません。
*8:詳細は、購入時にメーカーや代理店に確認できるのかなと思います。以下の事項は、あくまで私の仮説です。
*9:詳細は、購入時にメーカーや代理店に確認できるのかなと思います。以下の事項は、あくまで私の仮説です。
*10:トルク=磁束×電流できまる。それぞれ、磁束による損失(鉄損)、電流による損失(銅損)が生じる。低回転数時には、鉄損が大きくなるが電流は小さい。そこで低回転数時に磁束を小さく(電流を大きく)して、鉄損を減らしていると思われます。銅損は増えるが、鉄損+銅損は減り効率が上がるのだと思われます。